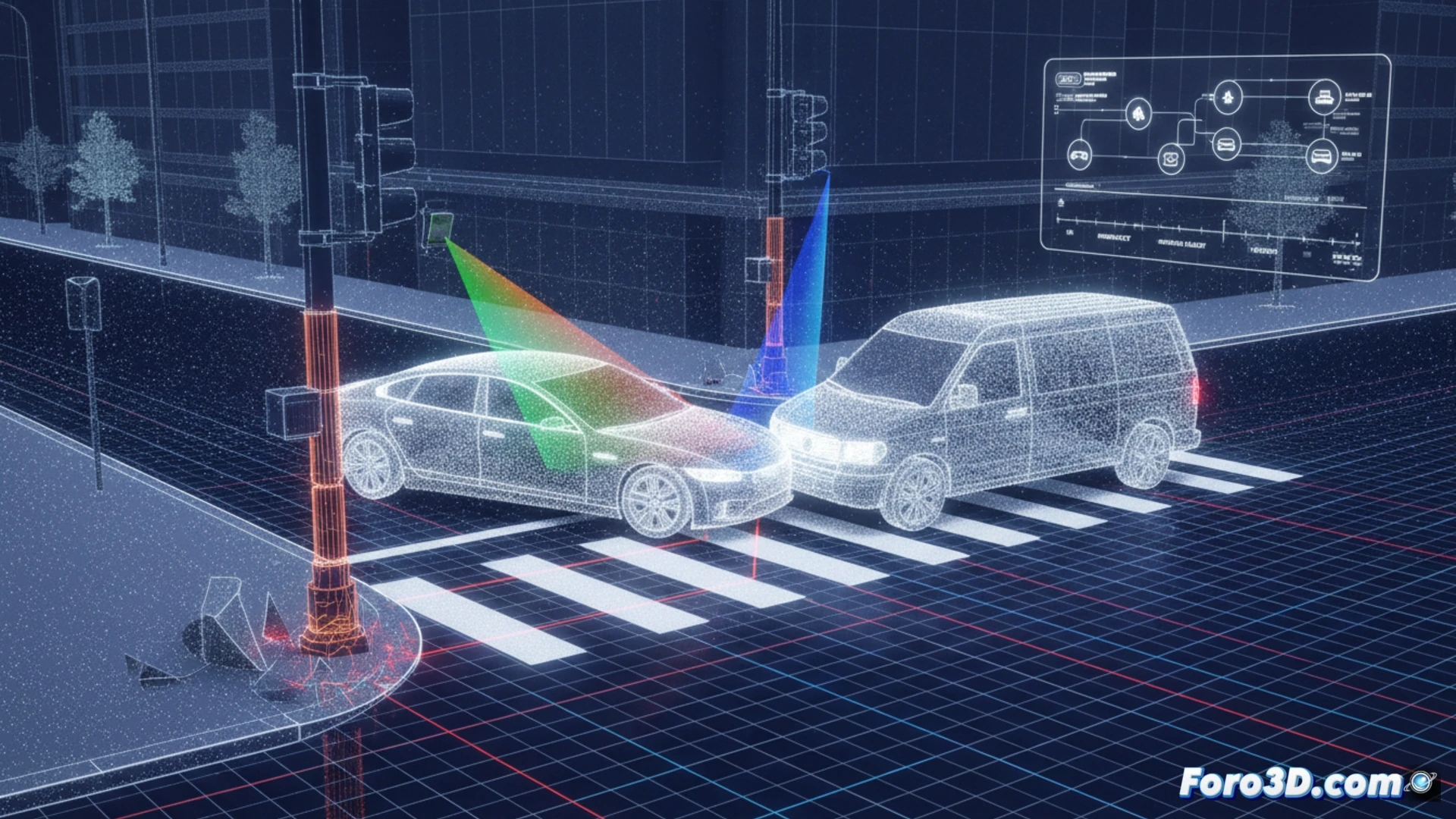
No mês passado, uma interseção inteligente equipada com sensores LiDAR de infraestrutura V2X foi palco de um acidente entre dois veículos autônomos. As autoridades, perplexas com a aparente falha do sistema de controle, recorreram a um pipeline forense 3D para esclarecer os fatos. A hipótese principal apontava para um erro de calibração induzido pela dilatação térmica do poste de montagem, uma falha difícil de detectar em tempo real, mas crítica para a segurança desses ambientes.
Fluxo de trabalho técnico: Da nuvem de pontos à simulação no UE5 🛠️
O processo começou com a extração das nuvens de pontos brutas registradas pelo LiDAR da interseção durante os segundos anteriores ao impacto. O primeiro passo crítico foi a importação desses dados no CloudCompare, onde foi realizado um alinhamento fino (registro ICP) das nuvens de pontos estáticas (postes, meios-fios) contra o modelo CAD da obra civil. Essa comparação revelou um deslocamento progressivo da nuvem de 4,2 centímetros no eixo Z, coincidindo com o pico de temperatura ambiente. Após confirmar o erro de calibração, a trajetória corrigida dos veículos foi exportada para o MATLAB para o cálculo da cinemática do impacto. Finalmente, os dados limpos e as malhas dos veículos foram integrados no Unreal Engine 5, onde a cena foi recriada com iluminação HDR e físicas realistas para visualizar o ponto exato da colisão e a manobra evasiva falha.
Lições para a validação de infraestrutura LiDAR 📐
Este caso ressalta a necessidade de implementar procedimentos de calibração dinâmicos em sensores V2X. A dilatação do poste, um fenômeno físico previsível, pode desviar a percepção de um veículo autônomo sem que os sistemas de bordo o detectem. A combinação de ferramentas como CloudCompare para a análise geométrica e Unreal Engine 5 para a simulação visual se consolida como o padrão de fato na investigação de acidentes de mobilidade conectada. Não se trata apenas de reconstruir um acidente, mas de entender como o ambiente físico e a infraestrutura digital interagem para falhar ou salvar vidas.
É possível detectar um erro de calibração LiDAR em uma interseção V2X através da análise de padrões de reflectância de objetos estáticos antes que ocorra um acidente como o descrito?
(PS: Na análise de cenas, cada testemunha de escala é um pequeno herói anônimo.)