El pasado mes, una intersección inteligente equipada con sensores LiDAR de infraestructura V2X fue el escenario de un accidente entre dos vehículos autónomos. Las autoridades, desconcertadas por la aparente falla del sistema de control, recurrieron a un pipeline forense 3D para esclarecer los hechos. La hipótesis principal apuntaba a un error de calibración inducido por la dilatación térmica del poste de montaje, un fallo difícil de detectar en tiempo real pero crítico en la seguridad de estos entornos.
Flujo de trabajo técnico: De la nube de puntos a la simulación en UE5 🛠️
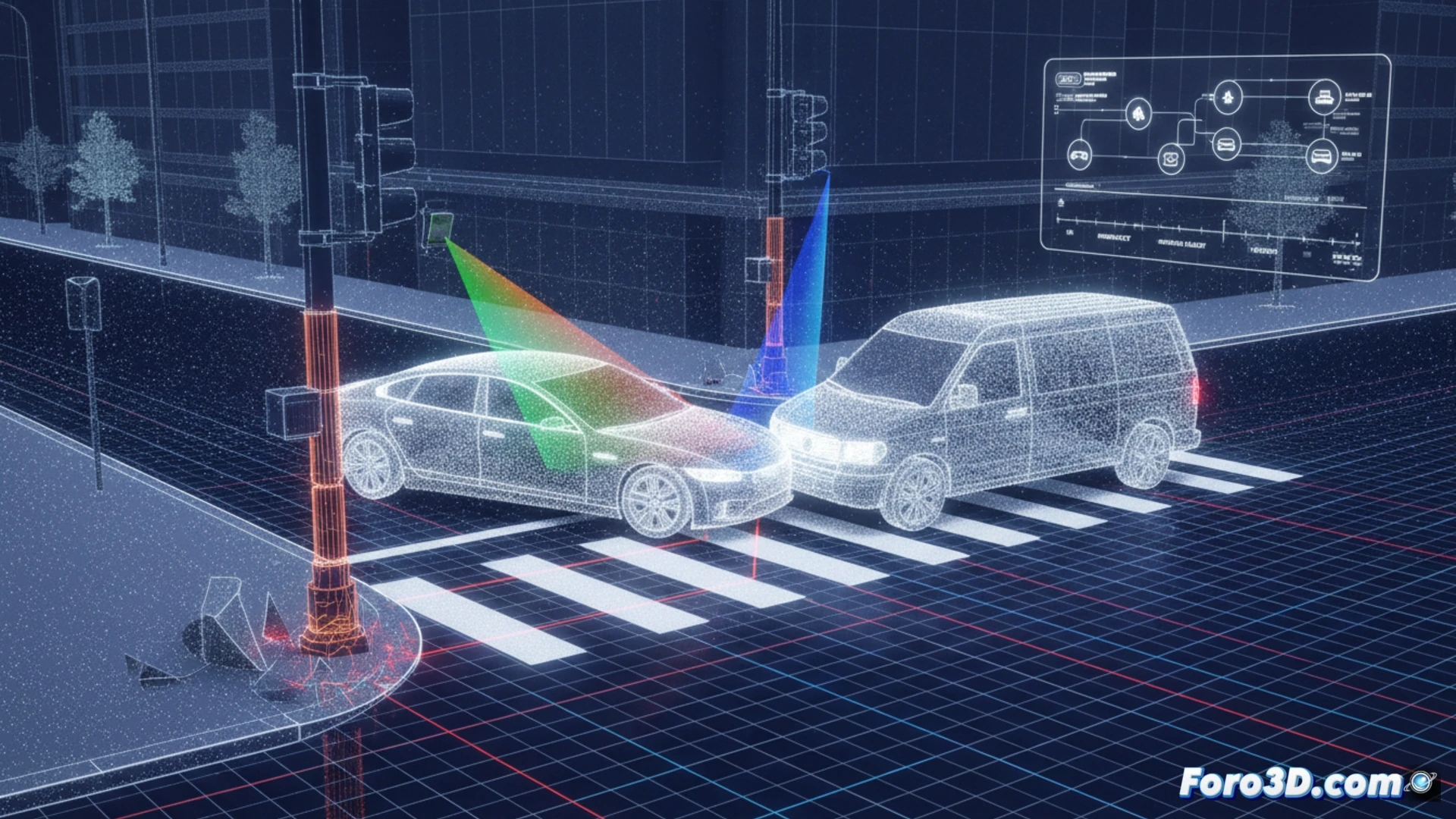
El proceso comenzó con la extracción de las nubes de puntos brutas registradas por el LiDAR de la intersección durante los segundos previos al impacto. El primer paso crítico fue la importación de estos datos en CloudCompare, donde se realizó una alineación fina (registro ICP) de las nubes de puntos estáticas (postes, bordillos) contra el modelo CAD de la obra civil. Esta comparación reveló un desplazamiento progresivo de la nube de 4.2 centímetros en el eje Z, coincidiendo con el pico de temperatura ambiente. Tras confirmar el error de calibración, se exportó la trayectoria corregida de los vehículos a MATLAB para el cálculo de la cinemática del impacto. Finalmente, los datos limpios y las mallas de los vehículos se integraron en Unreal Engine 5, donde se recreó la escena con iluminación HDR y físicas realistas para visualizar el punto exacto de colisión y la maniobra evasiva fallida.
Lecciones para la validación de infraestructura LiDAR 📐
Este caso subraya la necesidad de implementar procedimientos de calibración dinámicos en sensores V2X. La dilatación del poste, un fenómeno físico predecible, puede desviar la percepción de un vehículo autónomo sin que los sistemas de a bordo lo detecten. La combinación de herramientas como CloudCompare para el análisis geométrico y Unreal Engine 5 para la simulación visual se consolida como el estándar de facto en la investigación de accidentes de movilidad conectada. No se trata solo de reconstruir un accidente, sino de entender cómo el entorno físico y la infraestructura digital interactúan para fallar o salvar vidas.
Es posible detectar un error de calibración LiDAR en una intersección V2X mediante el análisis de patrones de reflectancia de objetos estáticos antes de que ocurra un accidente como el descrito?
(PD: En el análisis de escenas, cada testigo de escala es un pequeño héroe anónimo.)