O Aiper Scuba S1 Pro representa um salto na robótica de serviço doméstico, eliminando a dependência de mangueiras e conexões elétricas externas. Este robô limpador de piscina sem fio integra um sistema de navegação proprietário chamado WavePath 2.0, que permite executar uma limpeza completa do vaso da piscina. Sua autonomia energética e sua capacidade de escalar paredes e atacar a linha d'água o tornam um estudo de caso ideal para analisar como a automação 3D resolve problemas complexos de manutenção.
Arquitetura de Sensores e Algoritmo WavePath 2.0 🤖
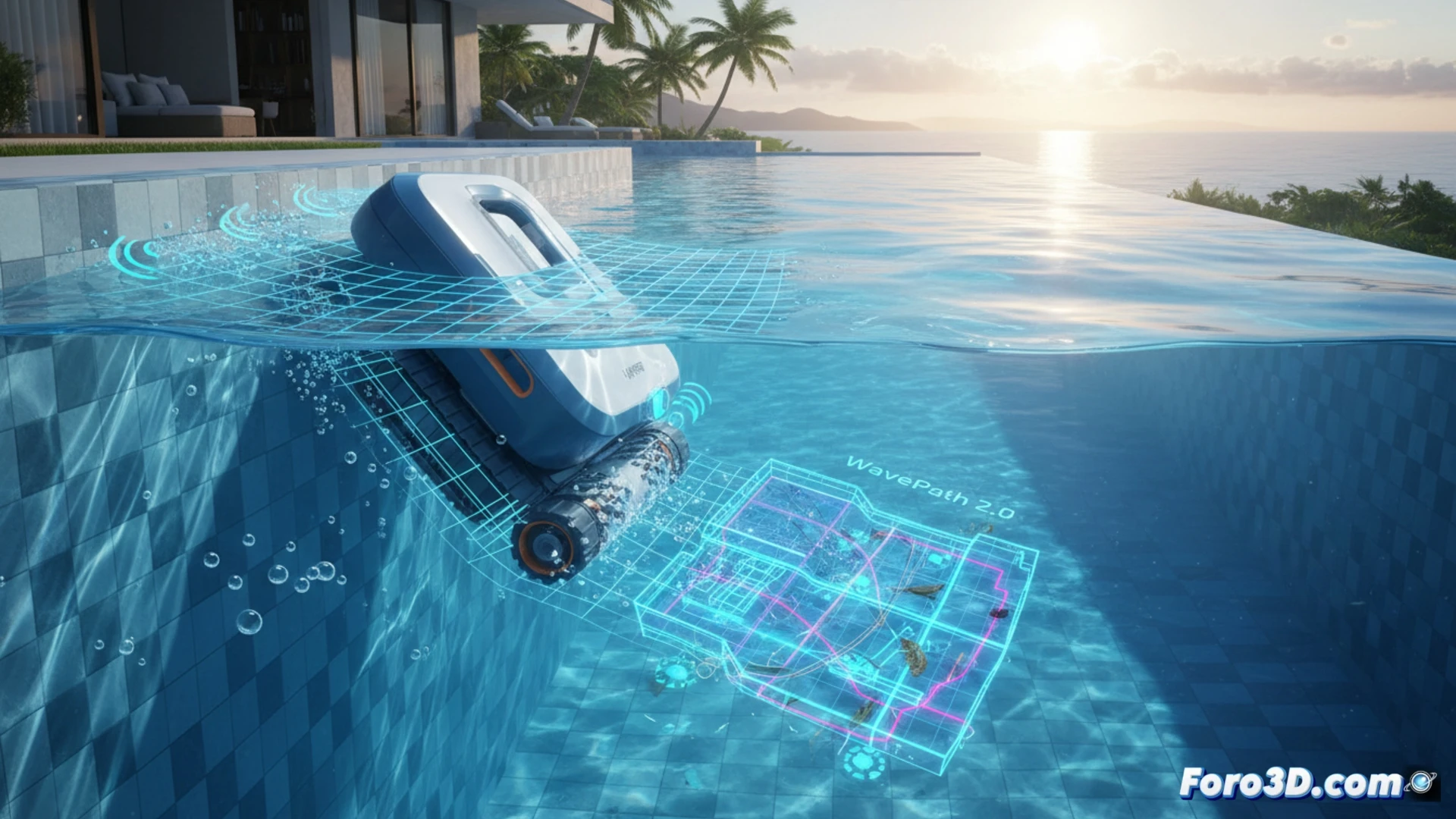
A chave do desempenho do Scuba S1 Pro reside em seu algoritmo de mapeamento volumétrico. Ao contrário de robôs que dependem de sensores de contato ou giroscópios simples, o sistema WavePath 2.0 utiliza uma combinação de acelerômetros de três eixos e sensores de pressão diferencial para construir um mapa tridimensional do ambiente. O robô não se limita a quicar aleatoriamente; ele calcula trajetórias em espiral e paralelas para cobrir o fundo, as paredes e a linha d'água. Quando detecta uma mudança de ângulo através do sensor de inclinação, ativa os motores de tração para escalar a parede vertical, utilizando a sucção gerada por sua bomba de duplo impulsor para aderir à superfície. Uma vez na linha d'água, reduz a velocidade e estende suas escovas laterais para raspar os resíduos acumulados, garantindo que 100% do perímetro seja coberto sem sobreposições desnecessárias.
Automação 3D vs. Sistemas Tradicionais 🏊
Comparado a robôs de piscina com fio ou modelos aleatórios, o S1 Pro demonstra eficiência energética e temporal superior. Os sistemas tradicionais geralmente perdem tempo limpando áreas já cobertas ou ficam presos em obstáculos como escadas. A automação 3D do Scuba S1 Pro, ao mapear o volume completo de água, otimiza a rota de retorno à estação de carregamento e prioriza as áreas de maior acúmulo de sujeira. Isso não apenas reduz o tempo do ciclo de limpeza em cerca de 30%, mas também minimiza o desgaste mecânico ao evitar colisões constantes. Este robô demonstra que a verdadeira inovação em robótica doméstica não está apenas na potência de sucção, mas na inteligência para se deslocar de forma eficiente em um ambiente tridimensional complexo como o de uma piscina.
De que forma a implementação de algoritmos de navegação autônoma em um robô de piscina como o Aiper Scuba S1 Pro resolve os principais desafios de eficiência energética e cobertura completa em ambientes aquáticos não estruturados?
(PS: Simular robôs é divertido, até que eles decidem não seguir suas ordens.)