El Aiper Scuba S1 Pro representa un salto en la robótica de servicio doméstico, eliminando la dependencia de mangueras y conexiones eléctricas externas. Este robot limpiafondos inalámbrico integra un sistema de navegación propietario llamado WavePath 2.0, que le permite ejecutar una limpieza integral del vaso de la piscina. Su autonomía energética y su capacidad para escalar paredes y atacar la línea de flotación lo convierten en un caso de estudio ideal para analizar cómo la automatización 3D resuelve problemas de mantenimiento complejos.
Arquitectura de Sensores y Algoritmo WavePath 2.0 🤖
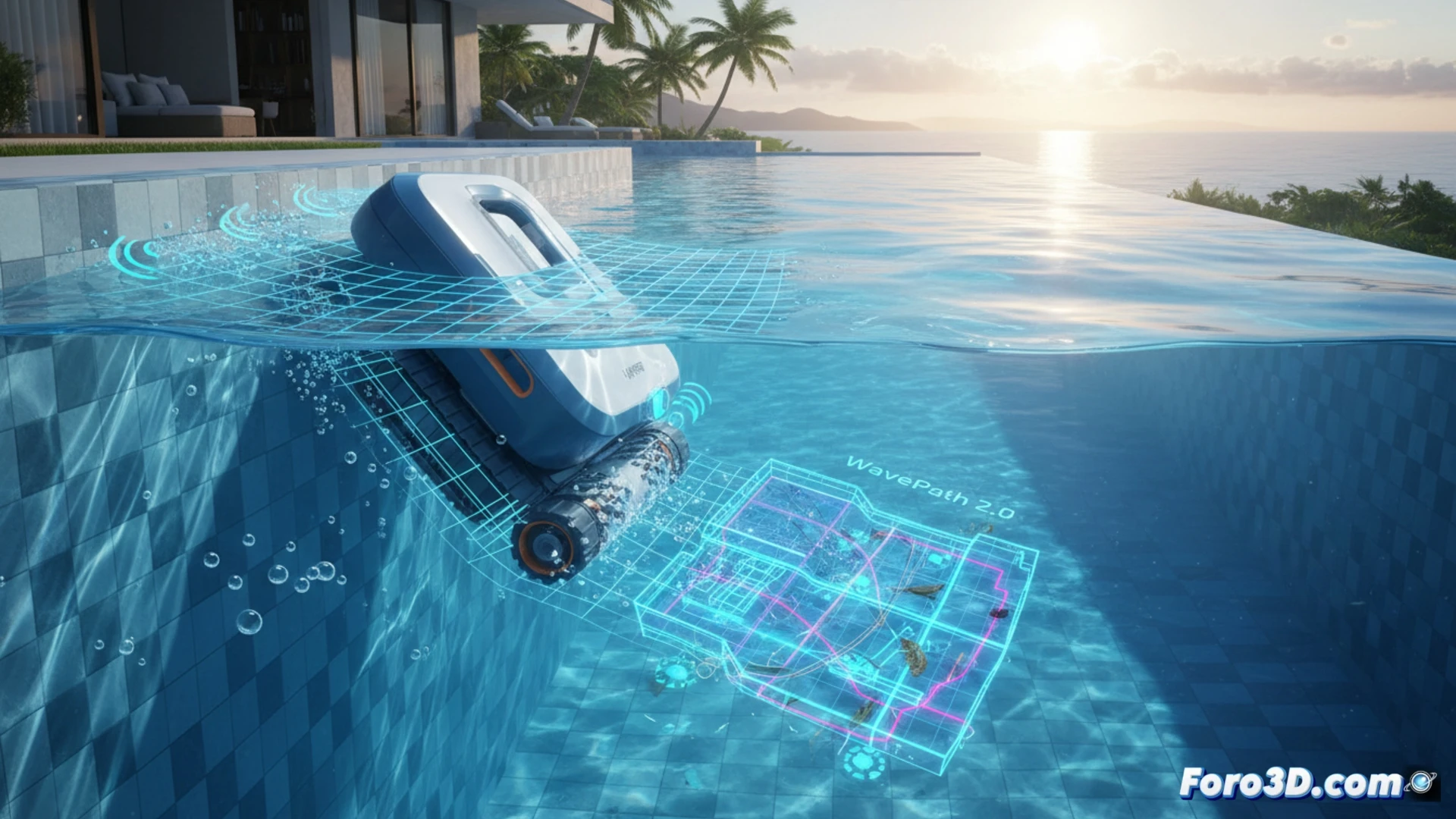
La clave del rendimiento del Scuba S1 Pro reside en su algoritmo de mapeo volumétrico. A diferencia de los robots que dependen de sensores de contacto o giroscopios simples, el sistema WavePath 2.0 utiliza una combinación de acelerómetros de tres ejes y sensores de presión diferencial para construir un mapa tridimensional del entorno. El robot no se limita a rebotar aleatoriamente; calcula trayectorias en espiral y en paralelo para cubrir el fondo, las paredes y la línea de agua. Cuando detecta un cambio de ángulo mediante el sensor de inclinación, activa los motores de tracción para escalar la pared vertical, utilizando la succión generada por su bomba de doble impulsor para adherirse a la superficie. Una vez en la línea de flotación, reduce la velocidad y extiende sus cepillos laterales para raspar los residuos acumulados, asegurando que el 100% del perímetro sea cubierto sin superposiciones innecesarias.
Automatización 3D vs. Sistemas Tradicionales 🏊
Comparado con robots de piscina cableados o modelos aleatorios, el S1 Pro demuestra una eficiencia energética y temporal superior. Los sistemas tradicionales suelen perder tiempo limpiando zonas ya cubiertas o quedan atrapados en obstáculos como escaleras. La automatización 3D del Scuba S1 Pro, al mapear el volumen completo de agua, optimiza la ruta de retorno a la estación de carga y prioriza las áreas de mayor acumulación de suciedad. Esto no solo reduce el tiempo de ciclo de limpieza en un 30% estimado, sino que también minimiza el desgaste mecánico al evitar colisiones constantes. Este robot demuestra que la verdadera innovación en robótica doméstica no está solo en la potencia de succión, sino en la inteligencia para desplazarse de forma eficiente en un entorno tridimensional complejo como el de una piscina.
De qué manera la implementación de algoritmos de navegación autónoma en un robot de piscina como el Aiper Scuba S1 Pro resuelve los principales desafíos de eficiencia energética y cobertura completa en entornos acuáticos no estructurados?
(PD: Simular robots es divertido, hasta que deciden no seguir tus órdenes.)