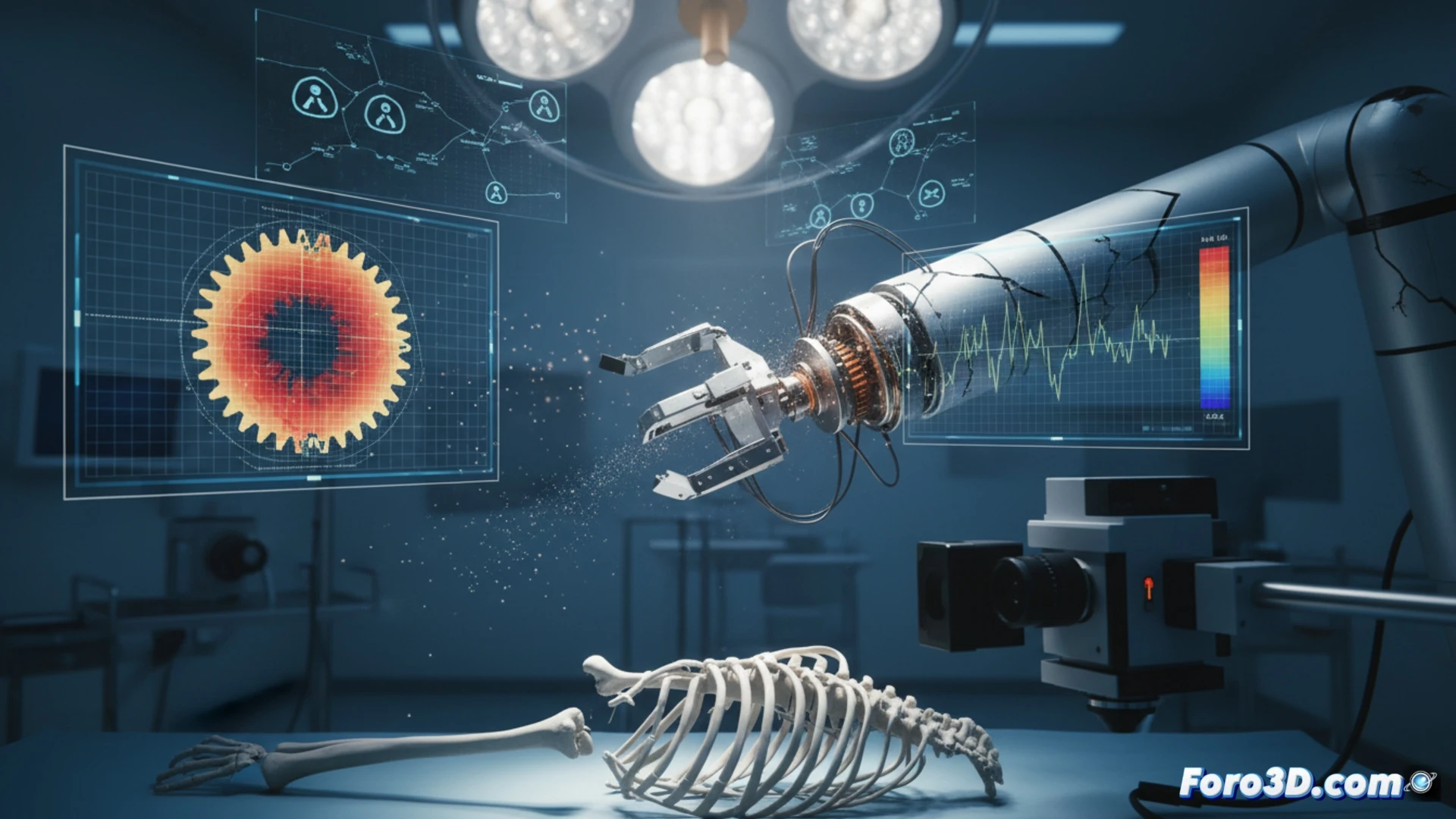
A recente falha de um robô cirúrgico durante uma operação remota acendeu alarmes no setor de automação. O incidente, onde o bisturi executou um movimento errático fatal, originou-se no braço robótico. Uma análise forense com metrologia óptica revelou que a causa não foi um erro de software, mas um microdesgaste assimétrico nos servomotores e engrenagens, induzido por uma latência no sinal de controle.
Metrologia de precisão: escaneamento e análise de fadiga 🔬
Para determinar a causa raiz, foi utilizado o scanner GOM ATOS Q para capturar a geometria dos servos e engrenagens do robô. O software de metrologia detectou desvios de apenas algumas mícrons nas superfícies de contato, um desgaste assimétrico impossível de ver a olho nu. Esse padrão de desgaste foi correlacionado com as microvibrações constantes registradas no MATLAB durante a operação. A latência no sinal de controle, embora imperceptível para o cirurgião, fez com que os servos oscilassem e corrigissem em excesso, gerando fadiga cíclica nos dentes das engrenagens de liga. Modelos no SolidWorks confirmaram que a tensão acumulada ultrapassou o limite de fadiga do material, causando a perda de precisão milimétrica.
Lições para gêmeos digitais e controle preditivo ⚙️
Este caso demonstra que a robótica cirúrgica não depende apenas da precisão do software, mas da integridade mecânica em escala micrométrica. A solução proposta passa por implementar gêmeos digitais no Blender e SolidWorks que simulem o desgaste em tempo real, alimentados por dados de latência. Um sistema de manutenção preditiva, baseado na análise de espectros de vibração do MATLAB, poderia detectar essas oscilações antes que gerem desgaste crítico. A falha não foi do hardware, mas de um projeto de controle que ignorou a fadiga mecânica induzida pela rede.
Como a indústria da robótica cirúrgica pode mitigar o risco de microdesgaste nos atuadores causado pela latência de sinal em operações de telecirurgia de longa distância?
(PS: Simular robôs é divertido, até que eles decidam não seguir suas ordens.)