La reciente falla de un robot quirúrgico durante una operación remota ha encendido las alarmas en el sector de la automatización. El incidente, donde el bisturí ejecutó un movimiento errático fatal, se originó en el brazo robótico. Un análisis forense con metrología óptica reveló que la causa no fue un error de software, sino un micro-desgaste asimétrico en los servomotores y engranajes, inducido por una latencia en la señal de control.
Metrología de precisión: escaneo y análisis de fatiga 🔬
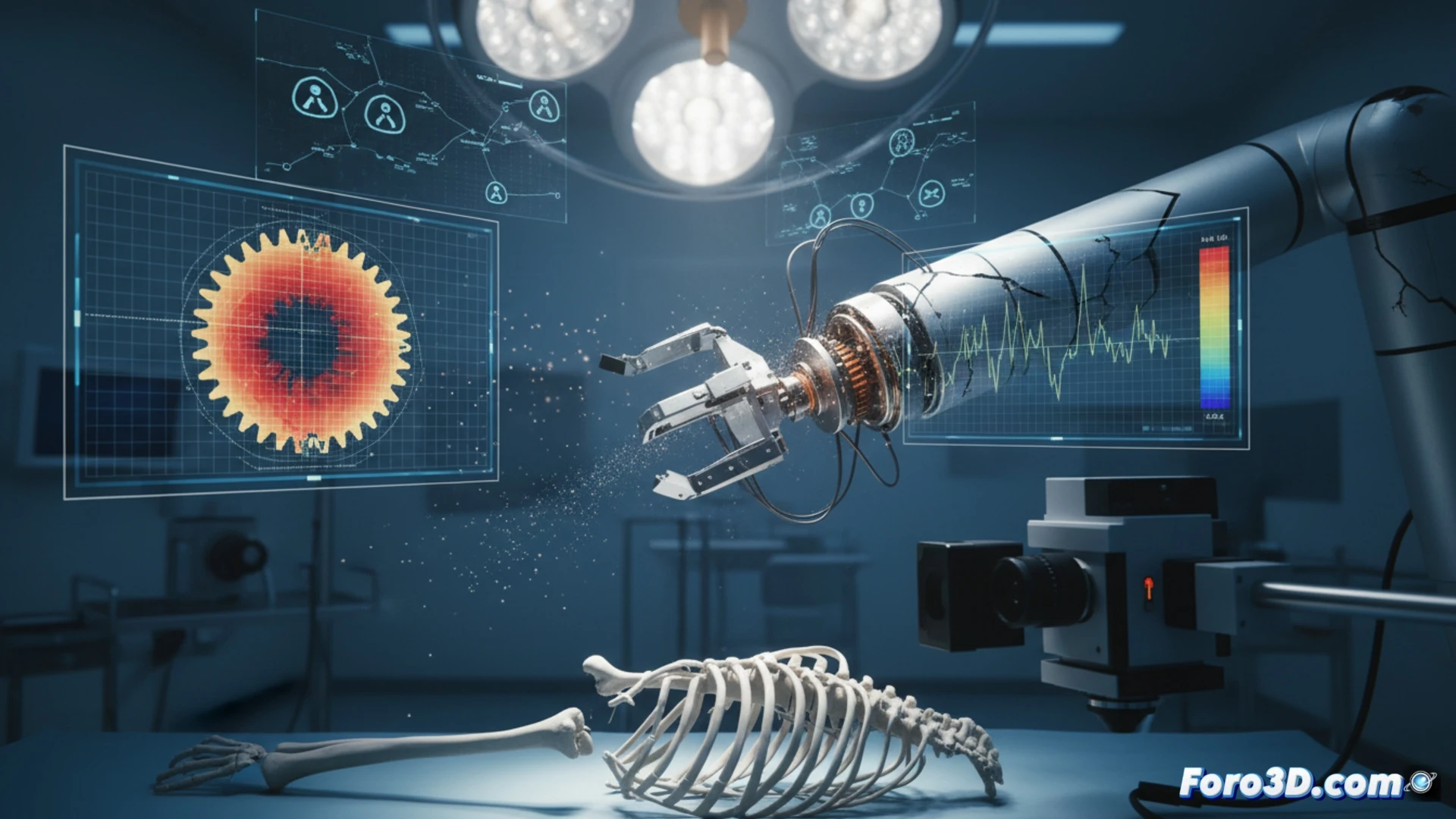
Para determinar la causa raíz, se utilizó el escáner GOM ATOS Q para capturar la geometría de los servos y engranajes del robot. El software de metrología detectó desviaciones de apenas unas micras en las superficies de contacto, un desgaste asimétrico imposible de ver a simple vista. Este patrón de desgaste se correlacionó con las micro-vibraciones constantes registradas en MATLAB durante la operación. La latencia en la señal de control, aunque imperceptible para el cirujano, provocó que los servos oscilaran y corrigieran en exceso, generando fatiga cíclica en los dientes de los engranajes de aleación. Modelos en SolidWorks confirmaron que la tensión acumulada superó el límite de fatiga del material, causando la pérdida de precisión milimétrica.
Lecciones para gemelos digitales y control predictivo ⚙️
Este caso demuestra que la robótica quirúrgica no solo depende de la precisión del software, sino de la integridad mecánica a escala micrométrica. La solución propuesta pasa por implementar gemelos digitales en Blender y SolidWorks que simulen el desgaste en tiempo real, alimentados por datos de latencia. Un sistema de mantenimiento predictivo, basado en el análisis de espectros de vibración de MATLAB, podría detectar estas oscilaciones antes de que generen desgaste crítico. El fallo no fue del hardware, sino de un diseño de control que ignoró la fatiga mecánica inducida por la red.
Cómo puede la industria de la robótica quirúrgica mitigar el riesgo de microdesgaste en los actuadores causado por la latencia de señal en operaciones de tele-cirugía a larga distancia?
(PD: Simular robots es divertido, hasta que deciden no seguir tus órdenes.)