Um vazamento pós-operatório após uma ressecção intestinal assistida por robô acendeu os alarmes em um hospital de referência. A suspeita inicial apontava para um erro do cirurgião, mas a análise forense por micro-CT revelou uma verdade mais complexa: os grampos de titânio apresentavam uma deformação insuficiente. Essa descoberta deslocou a investigação para o software do robô e sua capacidade de calcular a força de compressão adequada de acordo com a espessura do tecido.
Reconstrução micro-CT e simulação por elementos finitos no Abaqus 🧬
A equipe forense digitalizou os grampos extraídos por micro-CT, gerando modelos 3D de alta resolução no Materialise Mimics. Ao comparar a geometria real dos grampos deformados com a simulação ideal no Abaqus, evidenciou-se uma discrepância crítica. O software do robô havia aplicado uma força de compressão equivalente à de um tecido de 1,5 mm, quando a espessura real da parede intestinal era de 2,8 mm. Essa subestimação fez com que os grampos não atingissem a altura de fechamento necessária para selar o tecido, deixando microcanais por onde ocorreu o vazamento.
Calibração robótica: a espessura do tecido como variável não negociável 🤖
O caso demonstra que a precisão mecânica do robô é inútil se os algoritmos não integrarem corretamente a biomecânica do paciente. A lição é clara: os sistemas de cirurgia robótica devem calibrar seus parâmetros de compressão em tempo real, utilizando sensores ou dados pré-operatórios de tomografia. Ignorar a variabilidade da espessura tecidual transforma uma ferramenta de alta tecnologia em um risco evitável para o paciente.
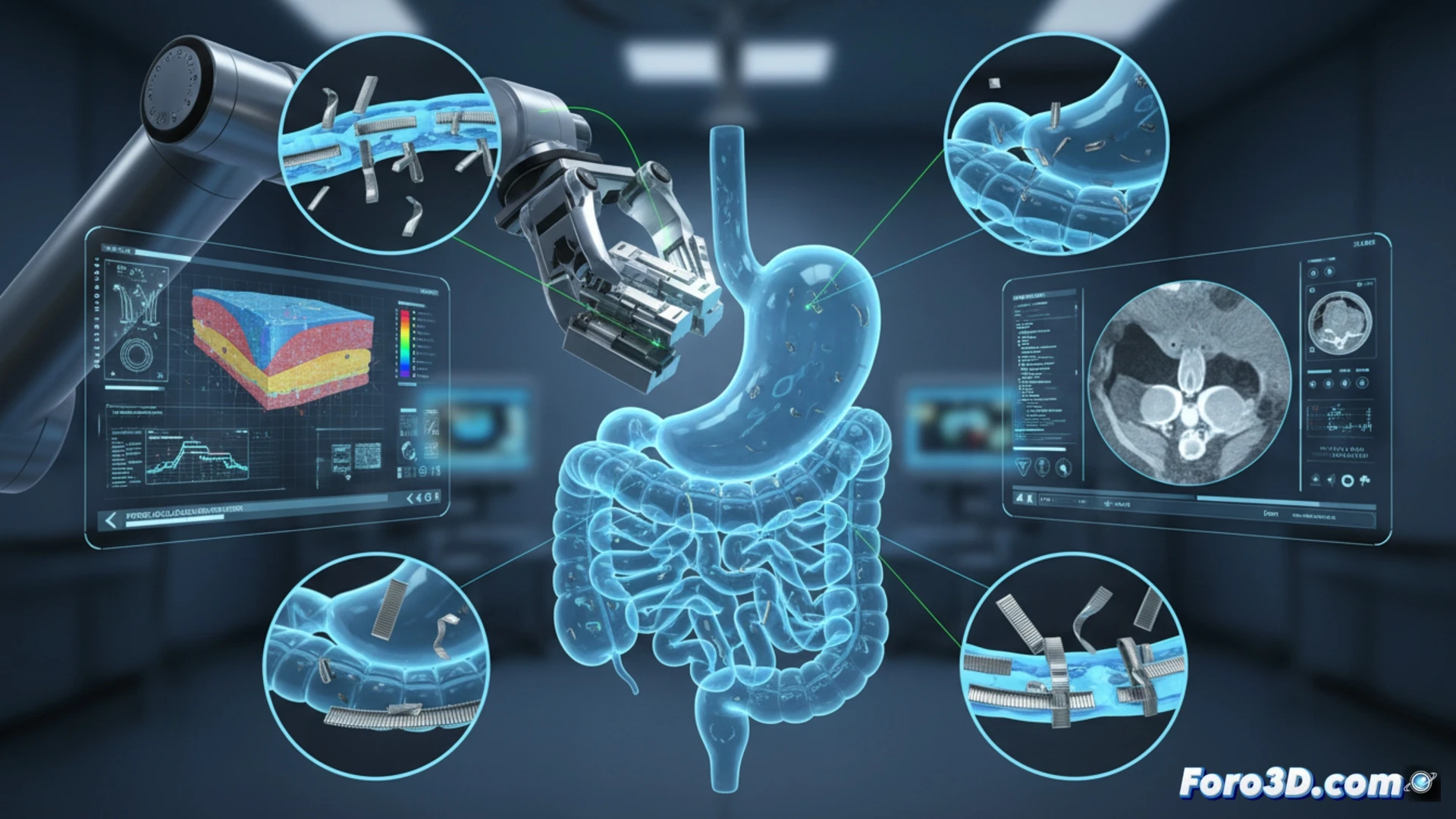
Como a análise 3D da morfologia e deformação de grampos falhos pode ser usada para prever e prevenir vazamentos anastomóticos em cirurgia robótica gastrointestinal.
(PS: Se você imprimir um coração em 3D, certifique-se de que ele bata... ou pelo menos que não dê problemas de direitos autorais.)