Una fuga postoperatoria tras una resección intestinal asistida por robot encendió las alarmas en un hospital de referencia. La sospecha inicial apuntaba a un error del cirujano, pero el análisis forense mediante micro-CT reveló una verdad más compleja: las grapas de titanio presentaban una deformación insuficiente. Este hallazgo desplazó la investigación hacia el software del robot y su capacidad para calcular la fuerza de compresión adecuada según el espesor del tejido.
Reconstrucción micro-CT y simulación por elementos finitos en Abaqus 🧬
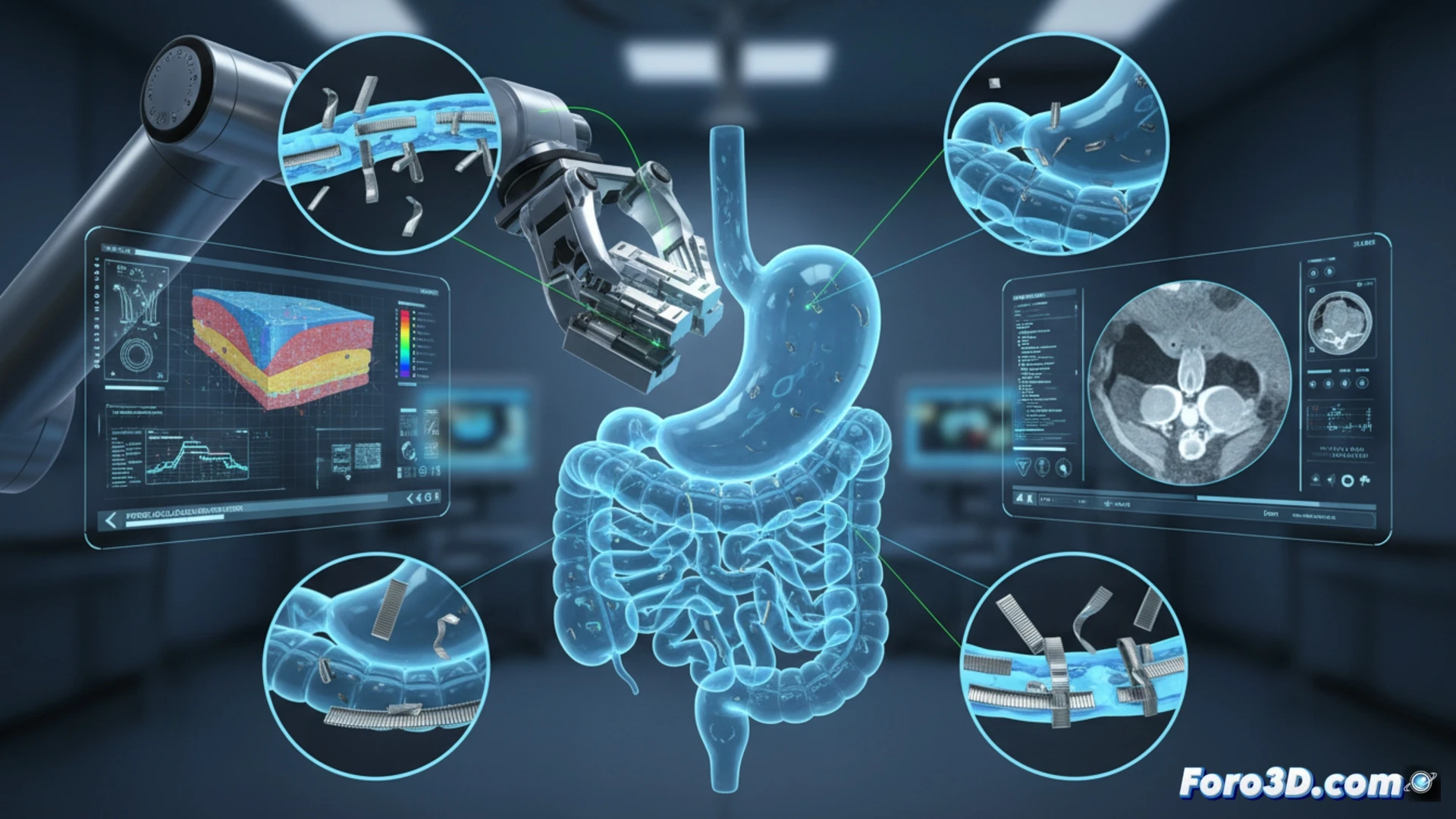
El equipo forense digitalizó las grapas extraídas mediante micro-CT, generando modelos 3D de alta resolución en Materialise Mimics. Al comparar la geometría real de las grapas deformadas con la simulación ideal en Abaqus, se evidenció una discrepancia crítica. El software del robot había aplicado una fuerza de compresión equivalente a la de un tejido de 1.5 mm, cuando el espesor real de la pared intestinal era de 2.8 mm. Esta subestimación provocó que las grapas no alcanzaran la altura de cierre necesaria para sellar el tejido, dejando microcanales por donde se produjo la fuga.
Calibración robótica: el espesor del tejido como variable no negociable 🤖
El caso demuestra que la precisión mecánica del robot es inútil si los algoritmos no integran correctamente la biomecánica del paciente. La lección es clara: los sistemas de cirugía robótica deben calibrar sus parámetros de compresión en tiempo real, utilizando sensores o datos preoperatorios de tomografía. Ignorar la variabilidad del espesor tisular convierte una herramienta de alta tecnología en un riesgo evitable para el paciente.
Como se puede utilizar el análisis 3D de la morfología y deformación de grapas fallidas para predecir y prevenir fugas anastomóticas en cirugía robótica gastrointestinal.
(PD: Si imprimes un corazón en 3D, asegúrate de que lata... o al menos que no dé problemas de copyright.)