O recente incidente de desgaste em um braço robótico cirúrgico reabre o debate sobre a fadiga de materiais em ambientes de alta precisão. Diferentemente da robótica industrial, onde uma falha pode parar uma linha de produção, na cirurgia assistida o desgaste compromete diretamente a segurança do paciente. Este artigo técnico analisa as causas da deterioração mecânica, o uso de gêmeos digitais para simular estresse cíclico e as estratégias de manutenção preditiva baseadas em modelos 3D.
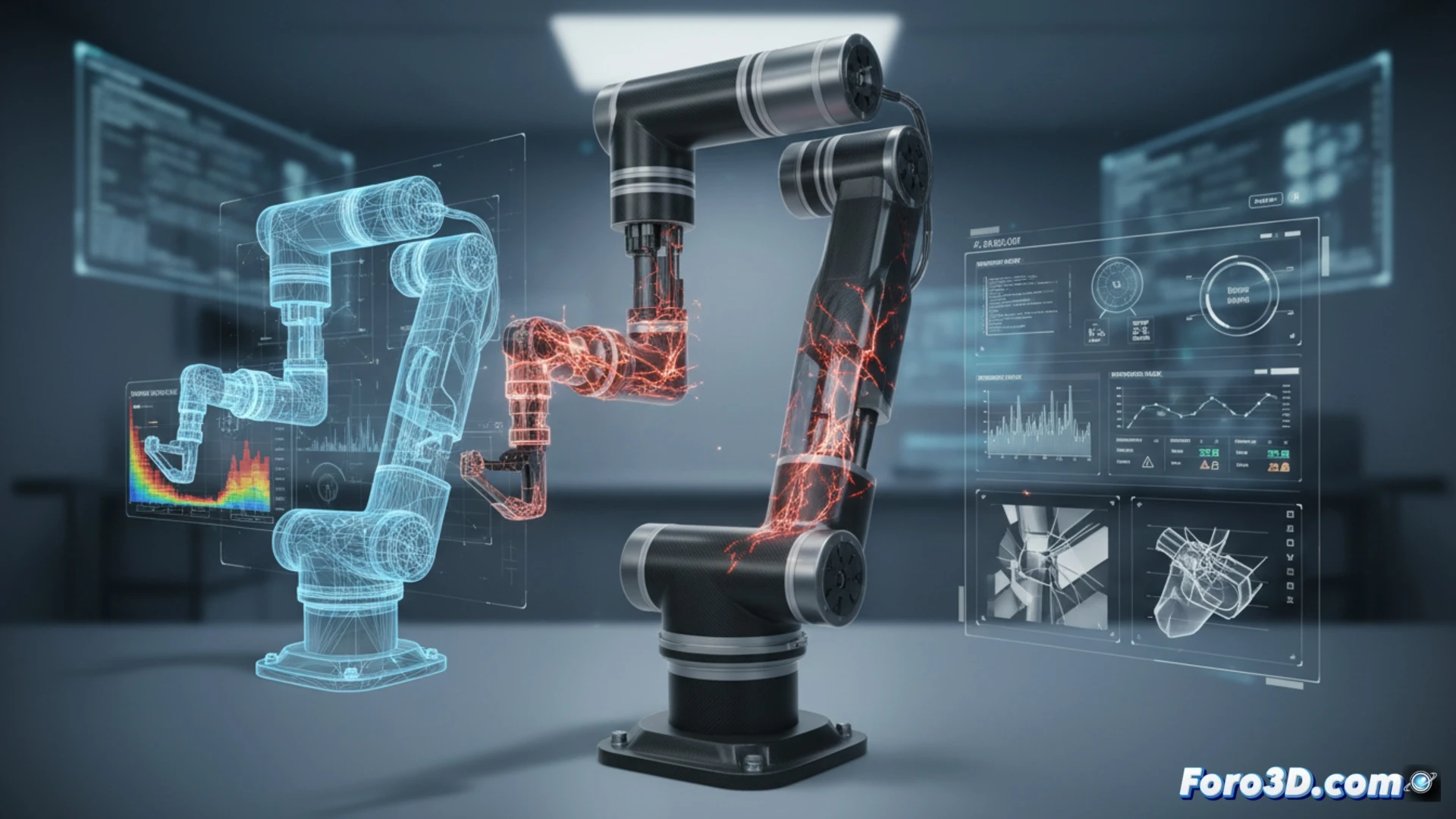
Simulação de pontos críticos de fadiga através de gêmeos digitais 🔧
O desgaste em um braço robótico cirúrgico geralmente se concentra nas articulações de rótula e nos redutores harmônicos, onde o torque repetitivo gera microfissuras. Através de simulações de elementos finitos integradas em gêmeos digitais, os engenheiros podem visualizar a distribuição de tensões em tempo real. Por exemplo, um modelo 3D do braço Da Vinci permite identificar que o cotovelo suporta 40% mais carga do que o estimado em projetos iniciais. Esta técnica, combinada com sensores de vibração, permite prever falhas com semanas de antecedência, ajustando os ciclos de lubrificação ou substituição de componentes críticos antes de uma intervenção real.
Implicações na segurança e o dilema da manutenção reativa ⚠️
A principal lição deste incidente é que a robótica médica não pode se permitir uma abordagem reativa. Cada microdesgaste não detectado pode se traduzir em um desvio milimétrico durante uma sutura. O uso de simulações 3D não apenas otimiza custos de manutenção, mas redefine os protocolos de certificação. Exigir que cada braço cirúrgico tenha um gêmeo digital atualizado com dados de fadiga deveria ser um padrão, não uma opção. A tecnologia para prever a falha existe; o desafio é implementá-la antes que o desgaste se torne um risco evitável.
Considerando o recente incidente de desgaste em um braço robótico cirúrgico, quais metodologias de simulação preditiva ou sensores de monitoramento em tempo real poderiam ser implementados para antecipar a fadiga mecânica nas articulações antes que comprometa a segurança do paciente?
(PS: Simular robôs é divertido, até que eles decidem não seguir suas ordens.)