El reciente incidente de desgaste en un brazo robótico quirúrgico reabre el debate sobre la fatiga de materiales en entornos de alta precisión. A diferencia de la robótica industrial, donde un fallo puede detener una línea de producción, en cirugía asistida el desgaste compromete directamente la seguridad del paciente. Este artículo técnico analiza las causas del deterioro mecánico, el uso de gemelos digitales para simular estrés cíclico y las estrategias de mantenimiento predictivo basadas en modelos 3D.
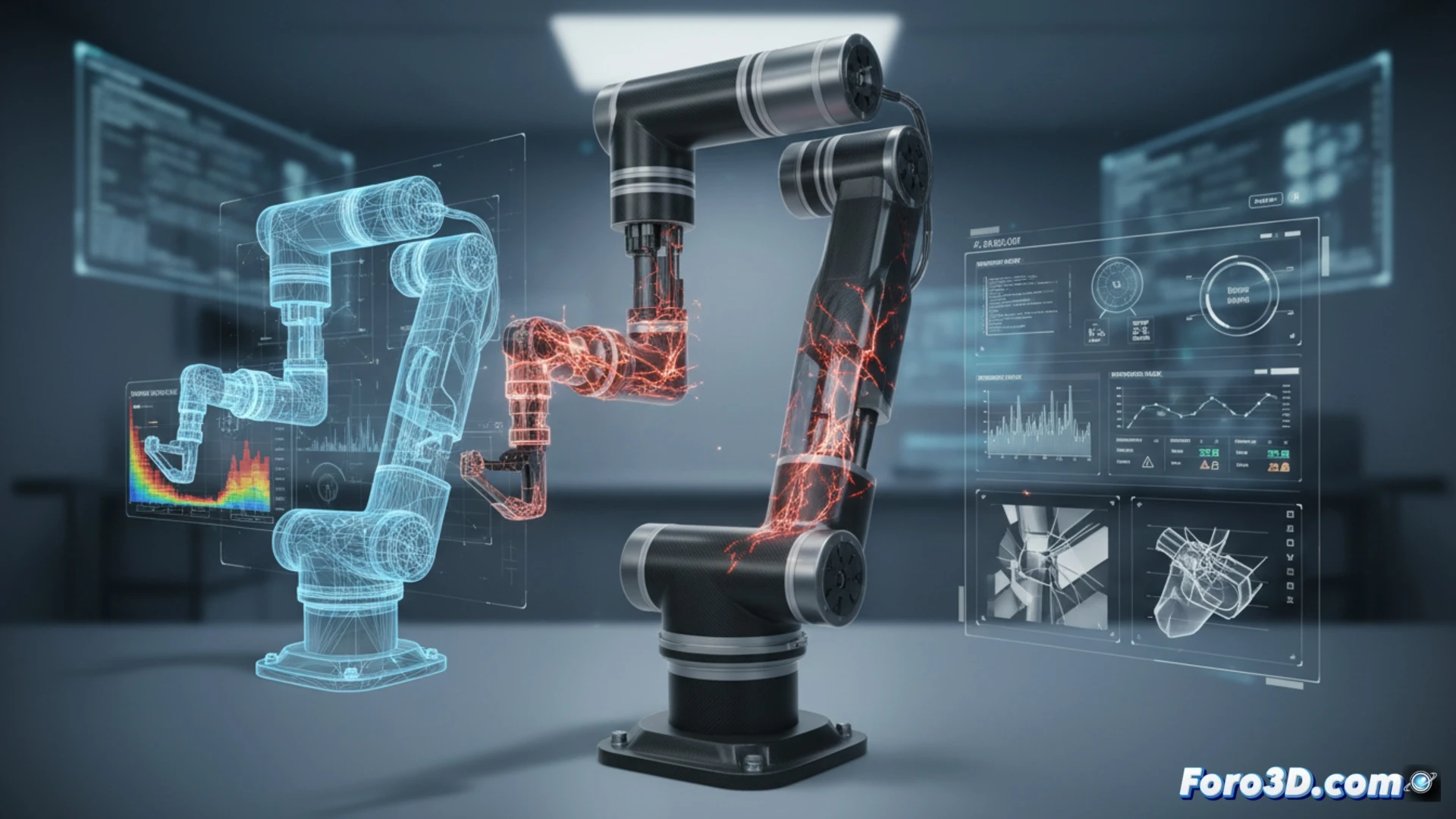
Simulación de puntos críticos de fatiga mediante gemelos digitales 🔧
El desgaste en un brazo robótico quirúrgico suele concentrarse en las articulaciones de rótula y los reductores armónicos, donde el par torsor repetitivo genera microfisuras. Mediante simulaciones de elementos finitos integradas en gemelos digitales, los ingenieros pueden visualizar la distribución de tensiones en tiempo real. Por ejemplo, un modelo 3D del brazo Da Vinci permite identificar que el codo soporta un 40% más de carga de lo estimado en diseños iniciales. Esta técnica, combinada con sensores de vibración, permite predecir fallos con semanas de antelación, ajustando los ciclos de lubricación o reemplazo de componentes críticos antes de una intervención real.
Implicaciones en seguridad y el dilema del mantenimiento reactivo ⚠️
La principal lección de este incidente es que la robótica médica no puede permitirse un enfoque reactivo. Cada microdesgaste no detectado puede traducirse en una desviación milimétrica durante una sutura. El uso de simulaciones 3D no solo optimiza costos de mantenimiento, sino que redefine los protocolos de certificación. Exigir que cada brazo quirúrgico tenga un gemelo digital actualizado con datos de fatiga debería ser un estándar, no una opción. La tecnología para predecir el fallo existe; el reto es implementarla antes de que el desgaste se convierta en un riesgo evitable.
Considerando el reciente incidente de desgaste en un brazo robótico quirúrgico, ¿qué metodologías de simulación predictiva o sensores de monitoreo en tiempo real podrían implementarse para anticipar la fatiga mecánica en las articulaciones antes de que comprometa la seguridad del paciente?
(PD: Simular robots es divertido, hasta que deciden no seguir tus órdenes.)