
Los robots colaborativos UR5 y UR10 de Universal Robots son pioneros en este campo. Estos brazos robóticos se diseñan para operar de forma segura cerca de operarios humanos sin requerir jaulas de protección tradicionales. Su filosofía se basa en integrar sensores de fuerza y par que permiten al robot detenerse o reducir su velocidad si percibe un contacto no programado. Esto abre la puerta a automatizar tareas en líneas de producción donde humano y máquina comparten espacio.
La programación intuitiva democratiza la robótica
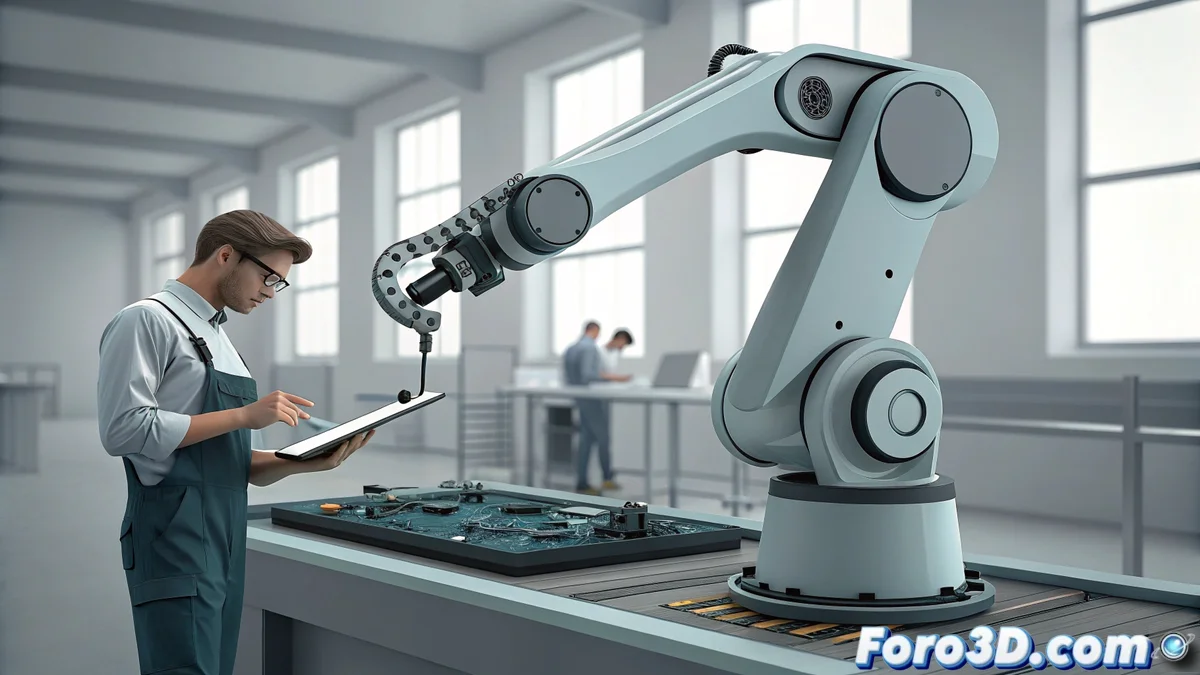
Una de sus características principales es la facilidad para programarlos. El usuario guía manualmente el brazo por los puntos clave de la tarea, usando una interfaz gráfica simple en una tableta. Este método elimina la necesidad de escribir código complejo, lo que permite que personal sin experiencia profunda en robótica pueda configurar aplicaciones como empaquetar, atornillar o manejar máquinas herramienta. Esta accesibilidad los hace populares en pequeñas y medianas empresas que buscan automatizar procesos de forma ágil.
La flexibilidad define su aplicación en la industria
Su diseño ligero y montaje en pedestal o en pared ofrece versatilidad para reubicarlos entre diferentes estaciones de trabajo. Se adaptan a entornos cambiantes donde las series de producción son cortas. Los modelos UR5 y UR10 se diferencian principalmente por su alcance y capacidad de carga, cubriendo desde tareas de precisión con cargas ligeras hasta manejar componentes más pesados. Su ecosistema de accesorios, como pinzas o sensores de visión, amplía aún más sus usos posibles.
Aunque prometen colaboración segura, siempre es recomendable realizar una evaluación de riesgos específica; no todos los procesos son aptos para un cobot sin medidas adicionales. Su éxito reside en que simplifican el concepto de robot industrial, haciendo que la automatización parezca menos intimidante y más como un compañero de trabajo.
×
 Lo primero
+ Publicar sobre
Lo primero
+ Publicar sobre
Configuración
Mis mensajes
Contacto
- 🎪 Actividades y Eventos
- 🎭 Animación y Rigging
- 🟦 Blueprint
- 🔬 Ciencia
- 🎬 Cine y TV VFX
- 📸 Fotografía
- 🖥️ Hardware
- 💡 Iluminación
- 🎨 Ilustración y 2D
- 🖨️ Impresoras 3D
- 🧱 Modelado
- 📰 Noticias
- 💥 Partículas y Dinámicas
- 🧩 Plugins
- 🎞️ Postproducción
- 🛠️ Programas General
- 📷 Render y Cámaras
- 🧵 Texturas y Materiales
- 🎮 Videojuegos
Configuración
Mis mensajes
Contacto

 Citar
Citar