Предварительная 3D-модель устраняет слепые зоны в безопасности
Планирование эффективной системы видеонаблюдения больше не зависит от предположений. Эксперты теперь создают цифрового двойника реального пространства с использованием технологий 3D-сканирования. Эта модель становится окончательной тестовой площадкой для проектирования, тестирования и доработки каждого компонента перед физической установкой, устраняя человеческие ошибки. 🎯
Создание цифровой основы с миллиметровой точностью
Первый шаг — захват реальности. Лазерный сканер, такой как Leica RTC360, регистрирует полную геометрию окружения, например, музея. Это устройство генерирует облако точек чрезвычайной плотности и точности. Техники затем обрабатывают эти данные в специализированном ПО, таком как Autodesk ReCap, для создания твердой и готовой к использованию 3D-модели. Эта виртуальная копия содержит каждую колонну, витрину и коридор с точностью.
Ключевые преимущества начального сканирования:- Абсолютная точность: Захватываются размеры и препятствия без запаса на ошибку.
- Полная документация: Получается постоянная 3D-запись состояния объекта.
- Основа для симуляций: Модель — это окружение, где будет тестироваться вся система.
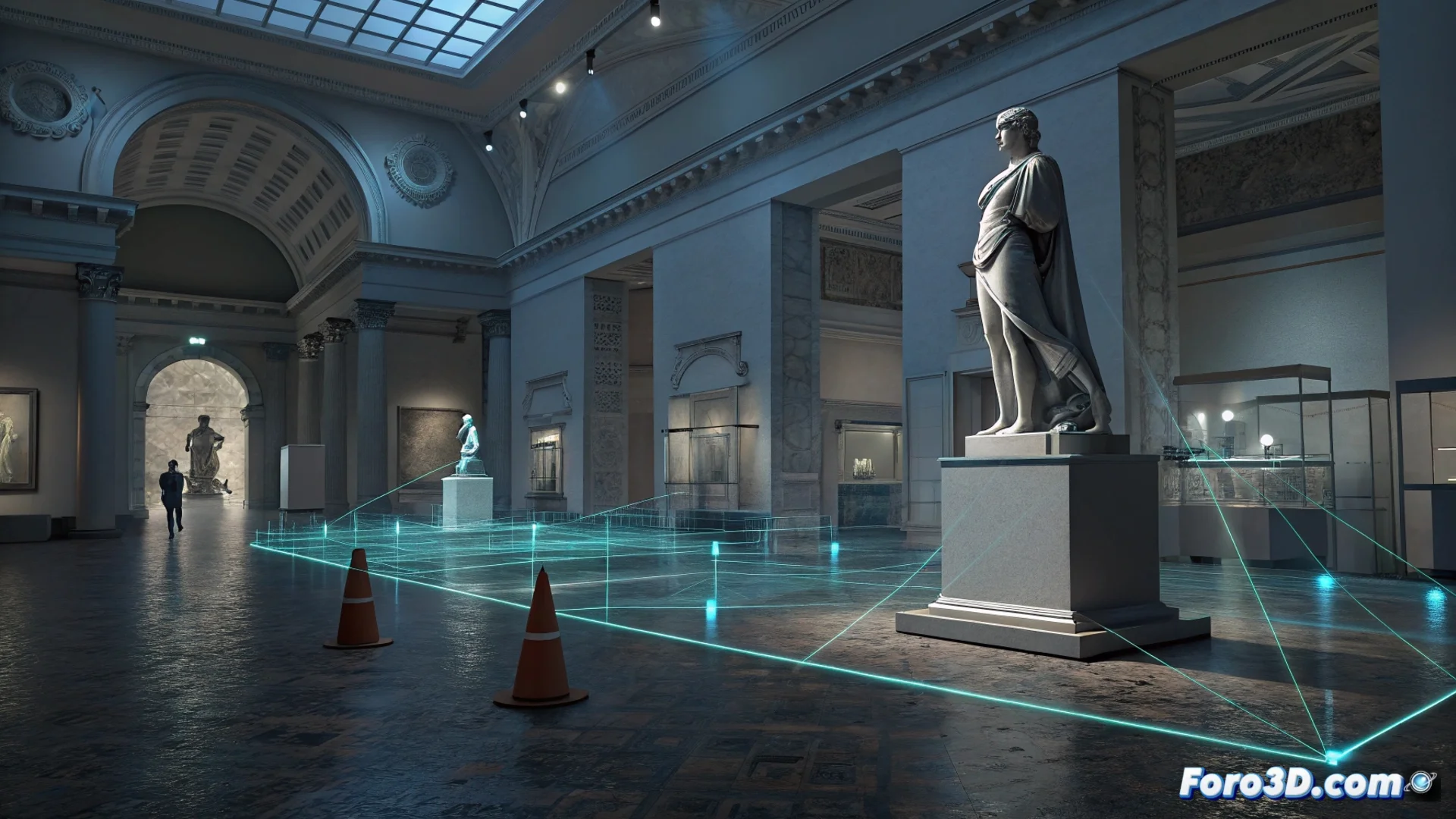
Настоящий вор в безопасности — это предположение, что случайное размещение камер работает. 3D-симуляция оставляет импровизацию без аргументов.
Симуляция и анализ покрытия в 3D-движке
С загруженной 3D-моделью в движок, такой как Unreal Engine или Unity, начинается активная фаза проектирования. Планировщики размещают виртуальные камеры видеонаблюдения в предлагаемых позициях. Они настраивают реальные технические параметры: фокусное расстояние, разрешение, угол наклона и поле зрения. ПО рендерит перспективу каждой камеры, автоматически рассчитывая покрытые зоны и, критически важно, тени и препятствия, создаваемые объектами окружения. Таким образом выявляются коридоры или углы, где человек может перемещаться незамеченным: слепые зоны.
Параметры, которые симулируются:- Поле зрения (FOV) и эффективный диапазон каждой камеры.
- Влияние архитектурных препятствий и мебели.
- Взаимодействие окружающего освещения с видением камеры.
Оптимизация проекта и валидация установки
Выявление слепых зон позволяет сразу итеративно улучшать проект. Техники корректируют позиции, меняют типы объективов или добавляют дополнительные устройства прямо в модели. Инструменты вроде JVSG IP Video System Design Tool помогают уточнить этот технический процесс. Конечная цель — добиться наложенного покрытия, где поле зрения одной камеры покрывает слепую зону другой. Только когда симуляция подтверждает полное покрытие без пробелов, план утверждается для установки физической системы. Этот метод экономит время, снижает затраты на переделки и гарантирует, что система будет работать как спроектировано с первого дня. ✅