Un modelo 3D previo elimina puntos ciegos en seguridad
Un modelo 3D previo elimina puntos ciegos en seguridad
Planificar un sistema de vigilancia eficaz ya no depende de suposiciones. Los expertos ahora construyen un gemelo digital del espacio real usando tecnologías de escaneo 3D. Este modelo se convierte en el campo de pruebas definitivo para diseñar, probar y refinar cada componente antes de su instalación física, eliminando el error humano. 🎯
Crear la base digital con precisión milimétrica
El primer paso es capturar la realidad. Un escáner láser, como el Leica RTC360, registra la geometría completa de un entorno, por ejemplo, un museo. Este dispositivo genera una nube de puntos extremadamente densa y precisa. Los técnicos luego procesan estos datos en software especializado, como Autodesk ReCap, para generar un modelo 3D sólido y listo para usar. Esta réplica virtual contiene cada columna, vitrina y pasillo con exactitud.
Ventajas clave del escaneo inicial:- Precisión absoluta: Se capturan dimensiones y obstáculos sin margen de error.
- Documentación completa: Se obtiene un registro 3D permanente del estado del sitio.
- Base para simulaciones: El modelo es el entorno donde se probará todo el sistema.
El verdadero ladrón en seguridad es la suposición de que colocar cámaras al azar funciona. La simulación 3D deja sin argumentos a la improvisación.
Simular y analizar la cobertura en el motor 3D
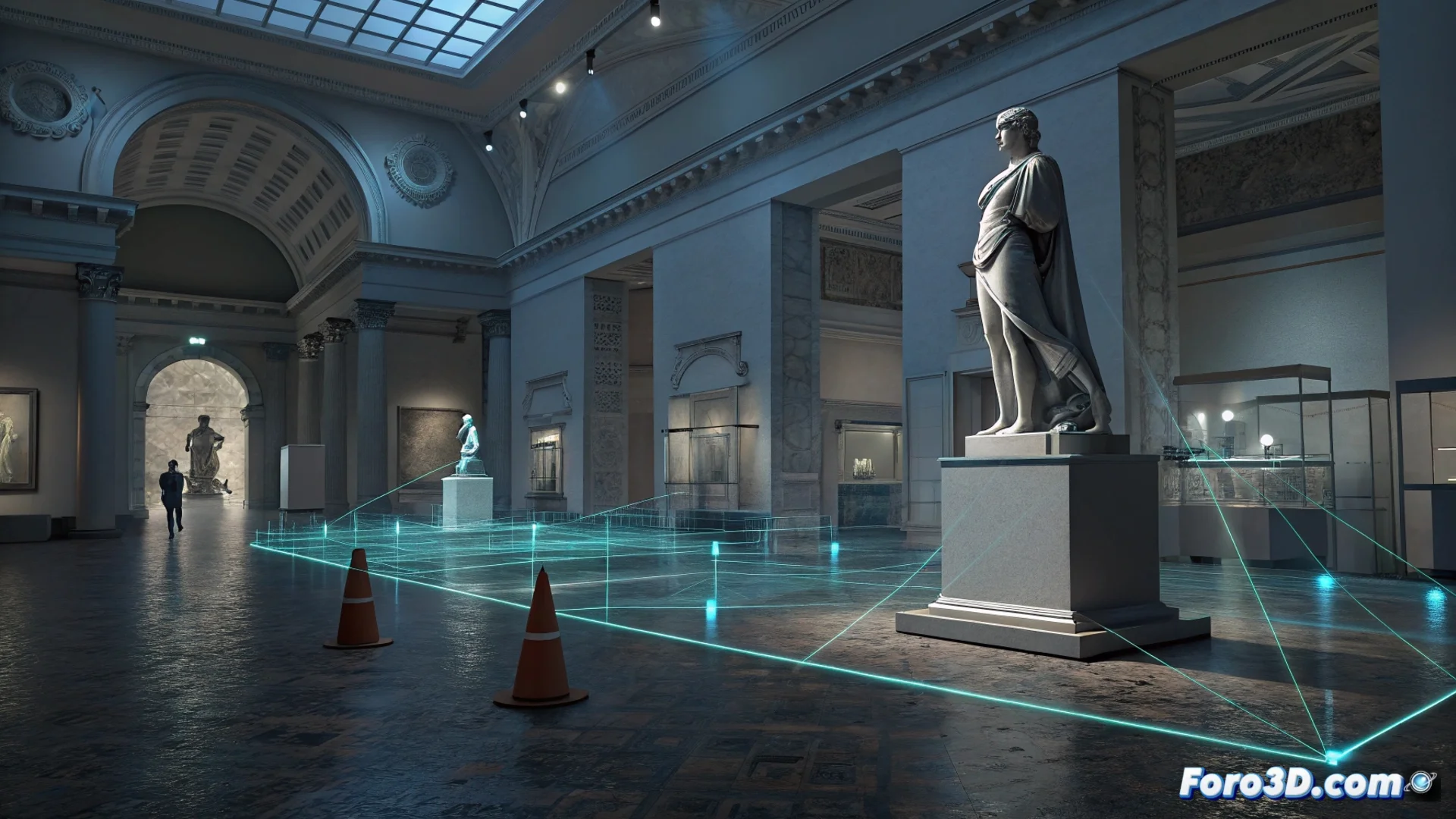
Con el modelo 3D cargado en un motor como Unreal Engine o Unity, comienza la fase de diseño activo. Los planificadores colocan cámaras de vigilancia virtuales en las ubicaciones propuestas. Configuran parámetros técnicos reales: distancia focal, resolución, ángulo de inclinación y campo de visión. El software renderiza la perspectiva de cada cámara, calculando automáticamente las zonas cubiertas y, de forma crítica, las sombras y obstrucciones que generan los objetos del entorno. Así se revelan los corredores o esquinas donde una persona podría moverse sin ser detectada: los puntos ciegos.
Parámetros que se simulan:- Campo de visión (FOV) y rango efectivo de cada cámara.
- Efecto de obstáculos arquitectónicos y mobiliario.
- Interacción de la iluminación ambiental con la visión de la cámara.
Optimizar el diseño y validar la instalación
Identificar los puntos ciegos permite iterar el diseño de inmediato. Los técnicos ajustan posiciones, cambian tipos de lente o añaden dispositivos adicionales directamente en el modelo. Herramientas como el JVSG IP Video System Design Tool ayudan a refinar este proceso técnico. El objetivo final es lograr una cobertura solapada, donde el campo visual de una cámara cubra el área ciega de otra. Solo cuando la simulación valida una cobertura total y sin brechas, se aprueba el plano para instalar el sistema físico. Este método ahorra tiempo, reduce costos por re-trabajos y garantiza que el sistema funcionará como se diseñó desde el primer día. ✅