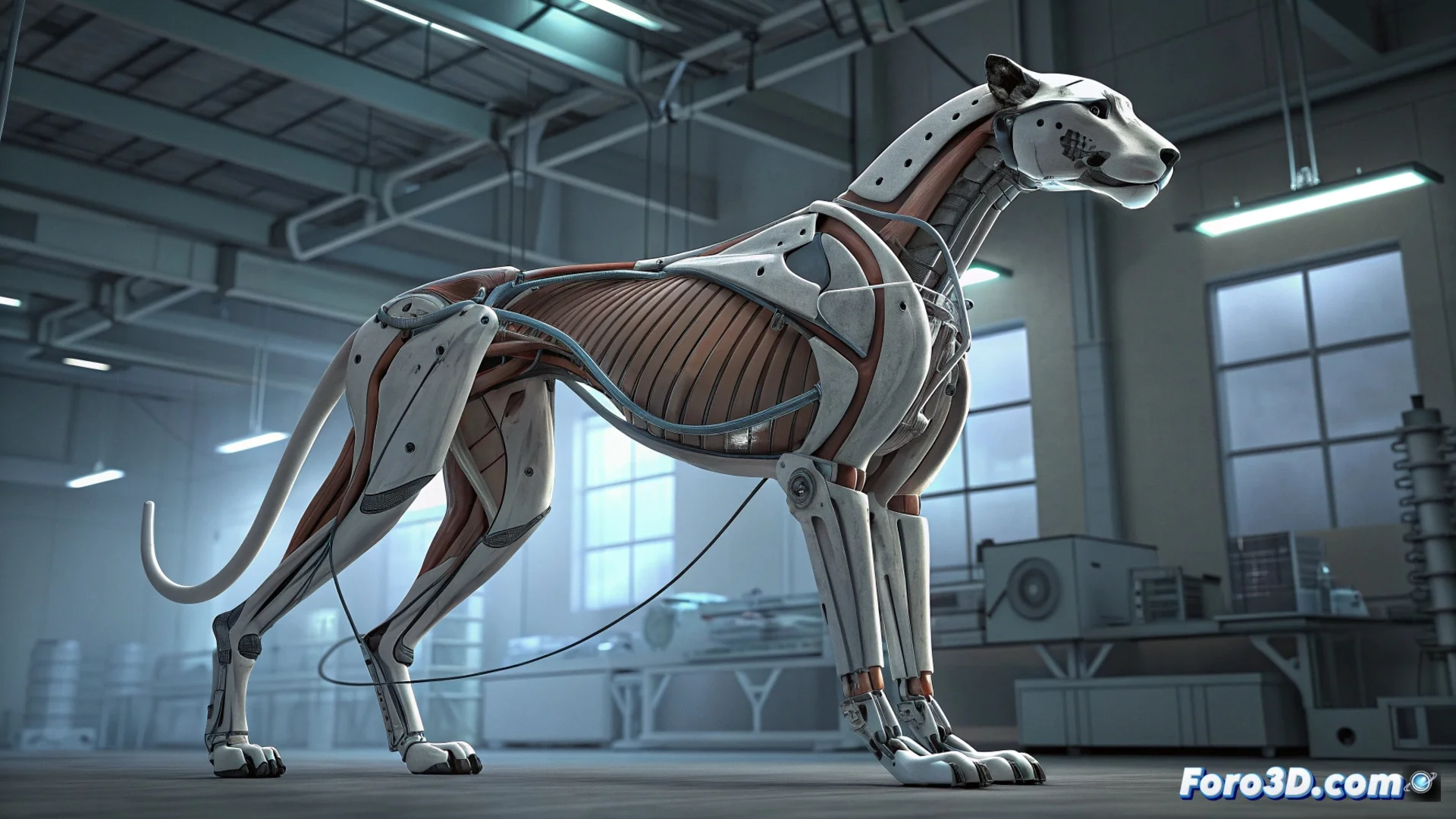
Pneupard: квадрупедный пневматический робот, имитирующий гепарда
В Университете Осаки команда ученых разрабатывает квадрупедного робота под названием Pneupard, система propulsión которого полностью основана на сжатом воздухе. Этот проект стремится воспроизвести механику мышц гепарда, самого быстрого наземного животного. Заменив электрические моторы пневматическими актуаторами, робот обретает естественную гибкость, которая позволяет ему двигаться динамично и адаптироваться к рельефу. 🐆
Пневматика определяет его мобильность и гибкость
Пневматическая система является ядром возможностей Pneupard. Актуаторы, питаемые воздухом под давлением, расширяются и сжимаются, чтобы имитировать реальное мышечное сокращение. Это обеспечивает локомоцию, которая не только потенциально быстрая, но и плавная, с присущей эластичностью. Комплаенс или адаптивность этих компонентов позволяет роботу взаимодействовать с окружающей средой более безопасно, поскольку он может амортизировать удары и модулировать силу при перемещении. Этот подход представляет собой перспективную альтернативу для проектирования роботов, которые должны работать на неровных или изменяющихся поверхностях.
Ключевые преимущества пневматической системы:- Обеспечивает внутреннюю гибкость, имитирующую биологические ткани.
- Позволяет быстрые движения и естественное поглощение ударов.
- Облегчает более безопасное взаимодействие с непредсказуемыми средами.
Элегантность естественного движения требует большего, чем просто имитация формы; необходимо воспроизвести физику мышц.
Физическая лаборатория для понимания движения животных
Основная цель Pneupard не коммерческая, а служить инструментом исследования высокого уровня. Исследователи используют его как осязаемую физическую модель для тестирования теорий о том, как животные координируют свои конечности и сохраняют равновесие. Анализируя данные его походки, можно лучше понять энергетическую эффективность, стабильность и ритмы локомоции в природе.
Потенциальные применения этого исследования:- Улучшение конструкции ходячих роботов для спасательных операций или исследований.
- Вдохновение на разработку более естественных и адаптивных роботизированных протезов.
- Создание новых систем физической реабилитации, основанных на биологических движениях.
Путь от имитации к равенству
Хотя его вдохновением служит стремительный гепард, текущая скорость Pneupard больше напоминает спокойную прогулку, чем бег. Эта деталь подчеркивает фундаментальный принцип: эмуляция сложности и эффективности биологических систем — это сложная инженерная задача. Pneupard не является конечной целью, а представляет собой ключевой шаг к сближению биологии и робототехники, демонстрируя, что иногда самое элегантное решение может быть основано на простом сжатом воздухе. 🤖