Pneupard: un robot cuadrúpedo neumático que imita a un guepardo
Pneupard: un robot cuadrúpedo neumático que imita a un guepardo
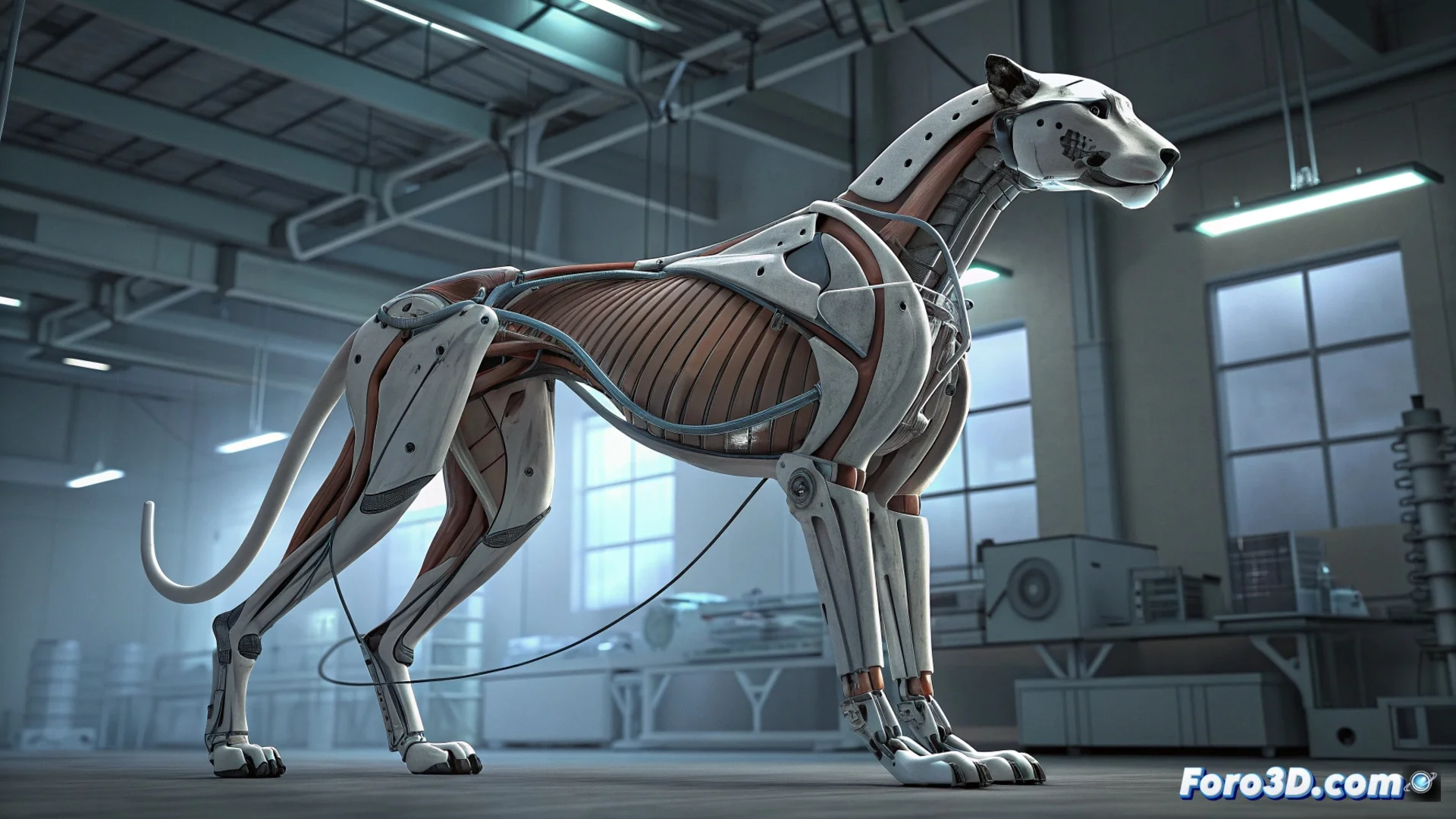
En la Universidad de Osaka, un equipo científico desarrolla un robot cuadrúpedo llamado Pneupard, cuyo sistema de propulsión se basa exclusivamente en aire comprimido. Este proyecto busca replicar la mecánica de los músculos de un guepardo, el animal terrestre más rápido. Al sustituir los motores eléctricos por actuadores neumáticos, el robot adquiere una flexibilidad natural que le permite moverse de forma dinámica y adaptarse al terreno. 🐆
La neumática define su movilidad y flexibilidad
El sistema neumático es el núcleo de las capacidades de Pneupard. Los actuadores, alimentados por aire a presión, se expanden y contraen para simular la contracción muscular real. Esto produce una locomoción que no solo es potencialmente rápida, sino también suave y con una elasticidad inherente. La compliance o adaptabilidad de estos componentes permite que el robot interactúe con su entorno de manera más segura, ya que puede amortiguar impactos y modular su fuerza al desplazarse. Este enfoque representa una alternativa prometedora para diseñar robots que deban operar en terrenos irregulares o cambiantes.
Ventajas clave del sistema neumático:- Proporciona una flexibilidad intrínseca que imita tejidos biológicos.
- Permite movimientos rápidos y una absorción natural de impactos.
- Facilita una interacción más segura con entornos impredecibles.
La elegancia del movimiento natural requiere más que solo imitar la forma; necesita replicar la física de los músculos.
Un laboratorio físico para entender cómo se mueven los animales
El propósito principal de Pneupard no es comercial, sino servir como una herramienta de investigación avanzada. Los investigadores lo emplean como un modelo físico tangible para probar teorías sobre cómo los animales coordinan sus extremidades y conservan el equilibrio. Al analizar los datos de sus patrones de marcha, se puede comprender mejor la eficiencia energética, la estabilidad y los ritmos de la locomoción en la naturaleza.
Aplicaciones potenciales de esta investigación:- Mejorar el diseño de robots caminantes para rescate o exploración.
- Inspirar el desarrollo de prótesis robóticas más naturales y adaptativas.
- Crear nuevos sistemas de rehabilitación física basados en movimientos biológicos.
El camino por recorrer entre la imitación y la igualación
Aunque su inspiración es el veloz guepardo, la velocidad actual de Pneupard se asemeja más a un paseo tranquilo que a una carrera. Este detalle subraya un principio fundamental: emular la sofisticación y eficiencia de los sistemas biológicos es un desafío de ingeniería complejo. Pneupard no es el destino final, sino un paso crucial para cerrar el ciclo entre la biología y la robótica, demostrando que a veces la solución más elegante puede estar impulsada por simple aire comprimido. 🤖