В прошлом месяце на умном перекрестке, оснащенном LiDAR-датчиками инфраструктуры V2X, произошла авария с участием двух автономных транспортных средств. Власти, озадаченные очевидным сбоем системы управления, обратились к криминалистическому 3D-конвейеру для выяснения обстоятельств происшествия. Основная гипотеза указывала на ошибку калибровки, вызванную тепловым расширением монтажной стойки — неисправность, которую трудно обнаружить в реальном времени, но критически важную для безопасности в таких средах.
Технический рабочий процесс: От облака точек к симуляции в UE5 🛠️
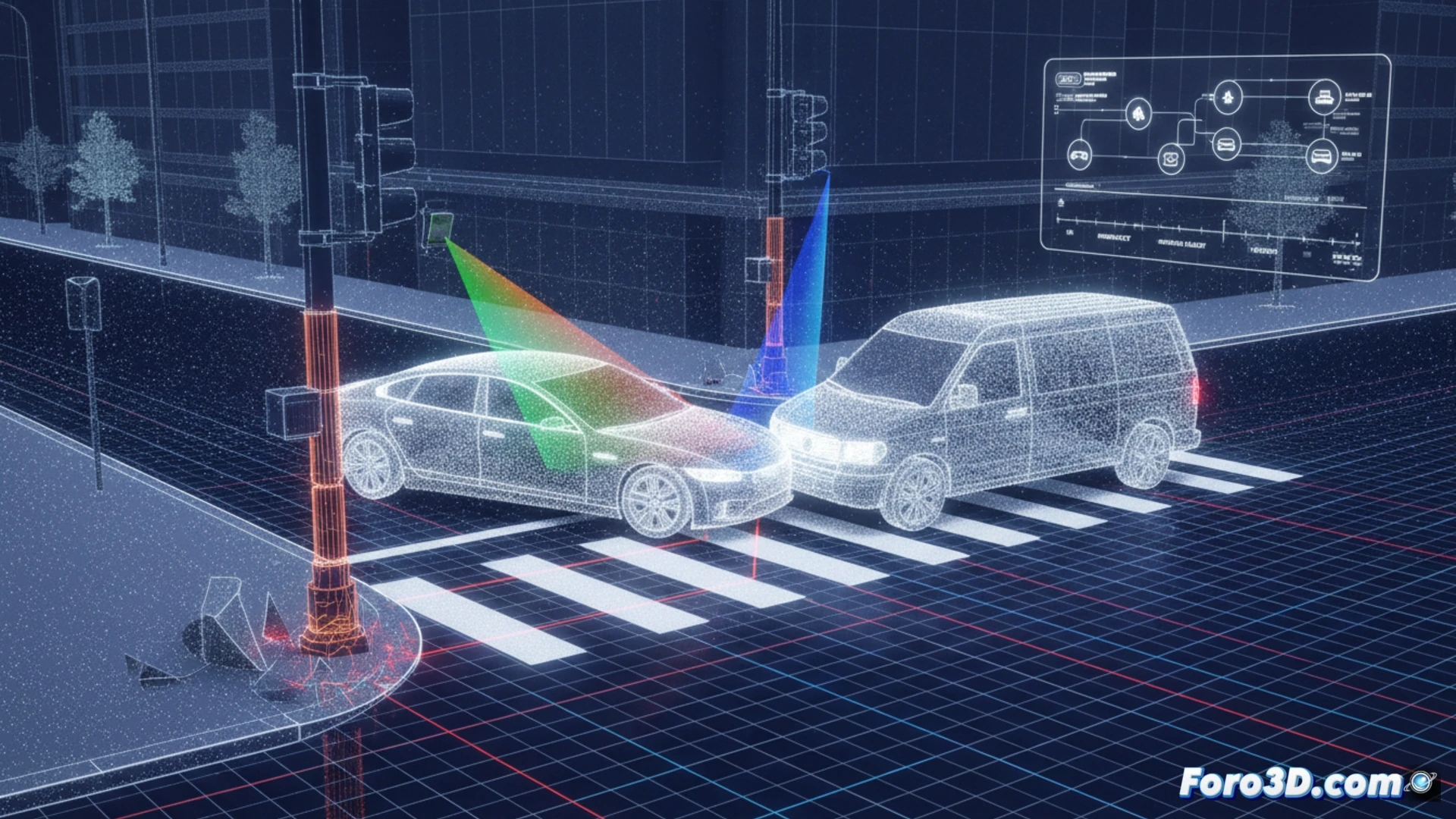
Процесс начался с извлечения необработанных облаков точек, зарегистрированных LiDAR на перекрестке за секунды до столкновения. Первым критическим шагом стал импорт этих данных в CloudCompare, где была выполнена точная выравнивание (ICP-регистрация) статических облаков точек (столбы, бордюры) относительно CAD-модели гражданского сооружения. Это сравнение выявило прогрессирующее смещение облака на 4,2 сантиметра по оси Z, совпадающее с пиком температуры окружающей среды. После подтверждения ошибки калибровки скорректированная траектория транспортных средств была экспортирована в MATLAB для расчета кинематики столкновения. Наконец, очищенные данные и сетки транспортных средств были интегрированы в Unreal Engine 5, где сцена была воссоздана с HDR-освещением и реалистичной физикой для визуализации точной точки столкновения и неудачного маневра уклонения.
Уроки для валидации инфраструктуры LiDAR 📐
Этот случай подчеркивает необходимость внедрения процедур динамической калибровки в датчиках V2X. Расширение стойки, предсказуемое физическое явление, может исказить восприятие автономного транспортного средства без обнаружения бортовыми системами. Сочетание таких инструментов, как CloudCompare для геометрического анализа и Unreal Engine 5 для визуальной симуляции, становится фактическим стандартом в расследовании аварий в сфере подключенной мобильности. Речь идет не только о реконструкции аварии, но и о понимании того, как физическая среда и цифровая инфраструктура взаимодействуют, чтобы привести к сбою или спасти жизни.
Можно ли обнаружить ошибку калибровки LiDAR на перекрестке V2X путем анализа паттернов отражательной способности статических объектов до того, как произойдет авария, подобная описанной?
(P.S.: В анализе сцен каждый масштабный свидетель — это маленький безымянный герой.)