Авария на интеллектуальном перекрестке произошла, когда светофор V2X показывал зеленый свет, но автономный автомобиль не среагировал вовремя. Чтобы выяснить причину сбоя, был построен точный цифровой двойник перекрестка. Эта модель воспроизвела реальную среду, используя уличные данные LIDAR, что позволило инженерам изолировать критическую переменную: задержку между обнаружением датчика и реакцией автомобиля. Целью было найти временной сдвиг, который превратил зеленый свет в смертельную ловушку.
Импорт облаков LIDAR и симуляция задержки в Unity 🚦
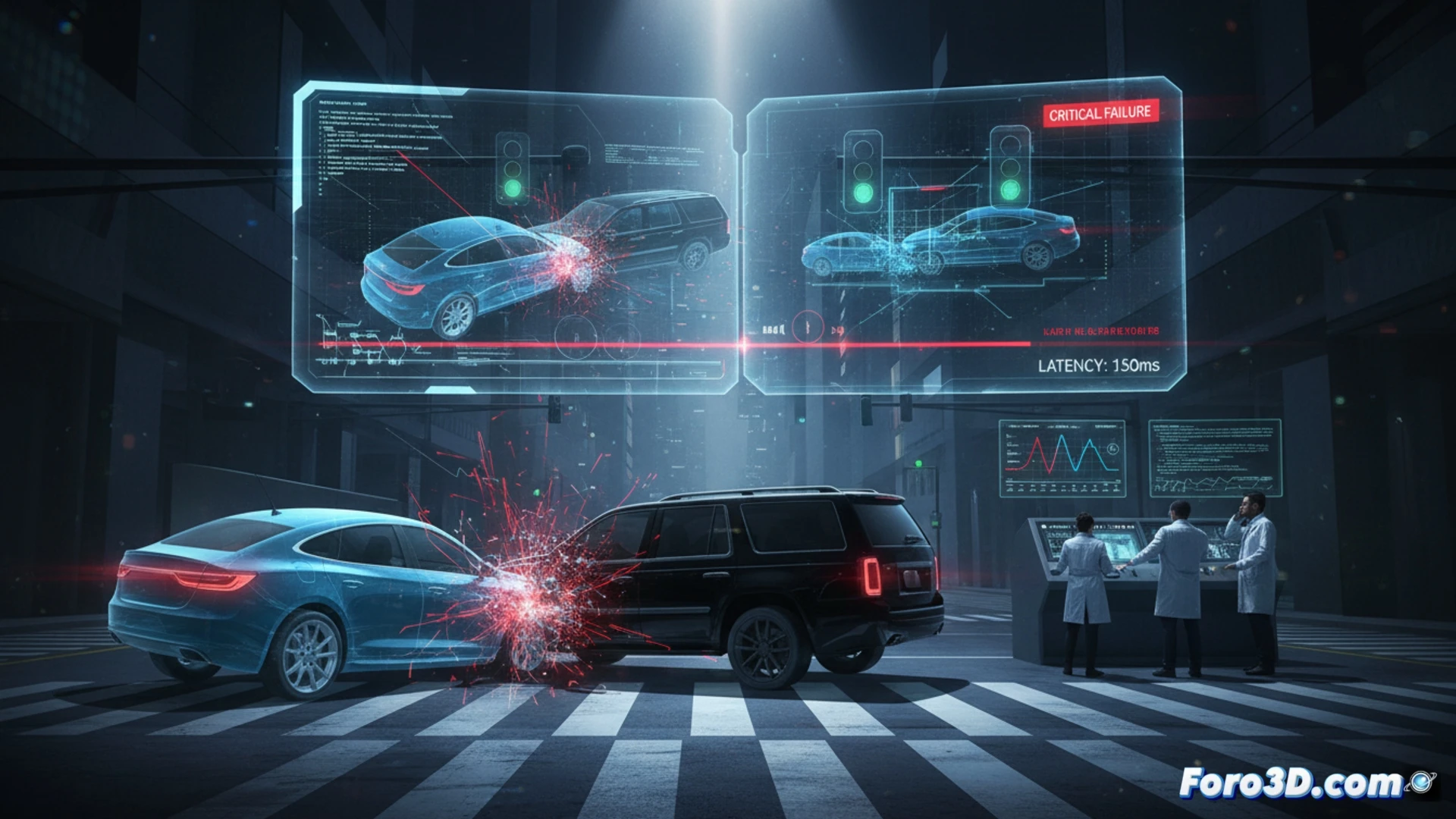
Процесс начался с захвата геометрии дороги с помощью стационарного датчика LIDAR на улице. Сырые данные были обработаны в CloudCompare для очистки от шума и выравнивания облаков точек с CAD-моделью перекрестка. Эта оптимизированная сетка была импортирована в Unity, где был создан цифровой двойник. Для воспроизведения аварии был запрограммирован скрипт, имитирующий задержку сети V2X. В Unreal Engine 5 была визуализирована точная последовательность: датчик LIDAR обнаруживал пешехода и отправлял сигнал, но автономный автомобиль получал команду на торможение с задержкой в 120 миллисекунд, достаточной для столкновения. MATLAB проанализировал временные сигналы цифрового двойника, сравнив временную метку LIDAR с меткой времени ЭБУ автомобиля, подтвердив критический сдвиг.
Уроки для более безопасных интеллектуальных инфраструктур 🛠️
Цифровой двойник показал, что сбой был не в датчике и не в автомобиле, а в протоколе синхронизации V2X. Задержка в 120 мс, хоть и небольшая, оказалась фатальной в условиях высокой скорости. Решение заключается не только в более быстром оборудовании, но и во внедрении временного буфера безопасности в программное обеспечение светофора, проверенного с помощью симуляций на цифровых двойниках. Этот случай подчеркивает, что надежность умного города зависит от идеальной синхронизации между его виртуальными двойниками и физическими системами.
Как инженер, какая конкретная задержка в миллисекундах между светофором V2X и облаком цифрового двойника вызвала фатальный сдвиг в реакции автономного автомобиля?
(P.S. Мой цифровой двойник сейчас на совещании, пока я здесь моделирую. Так что технически я нахожусь в двух местах одновременно.)