Un accidente en una intersección inteligente ocurrió cuando el semáforo V2X marcaba vía libre, pero el vehículo autónomo no reaccionó a tiempo. Para esclarecer el fallo, se construyó un gemelo digital exacto de la intersección. Este modelo replicó el entorno real usando datos LIDAR de calle, permitiendo a los ingenieros aislar la variable crítica: la latencia entre la detección del sensor y la respuesta del vehículo. El objetivo era encontrar el desfase temporal que convirtió una luz verde en una trampa mortal.
Importación de nubes LIDAR y simulación de latencia en Unity 🚦
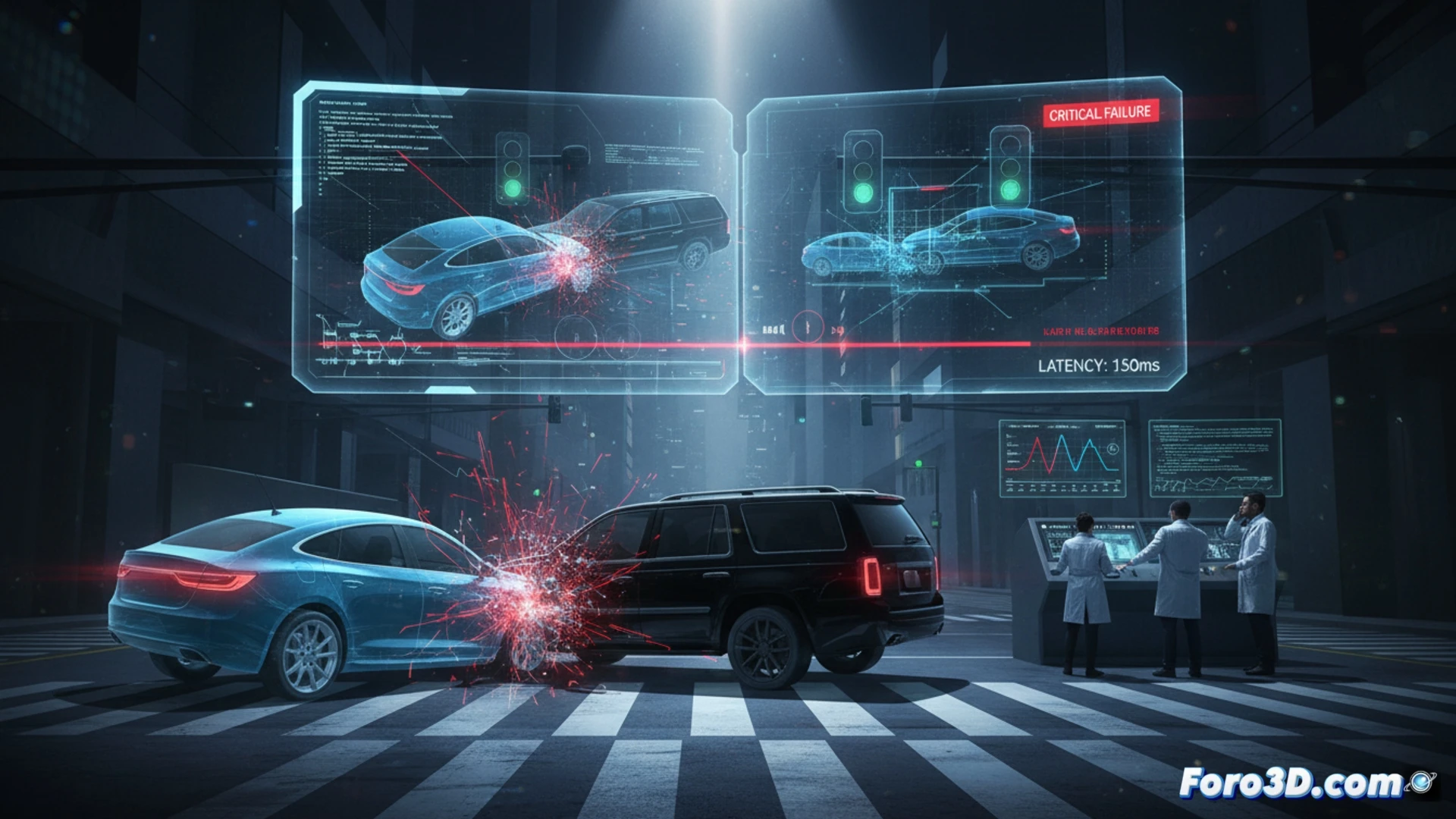
El proceso comenzó con la captura de la geometría vial mediante un sensor LIDAR fijo en la calle. Los datos en bruto se procesaron en CloudCompare para limpiar el ruido y alinear las nubes de puntos con el modelo CAD de la intersección. Esta malla optimizada se importó a Unity, donde se creó el gemelo digital. Para replicar el accidente, se programó un script que simulaba la latencia de la red V2X. En Unreal Engine 5, se visualizó la secuencia exacta: el sensor LIDAR detectaba un peatón y enviaba la señal, pero el vehículo autónomo recibía la orden de frenado con un retraso de 120 milisegundos, suficiente para provocar el impacto. MATLAB analizó las señales de tiempo del gemelo, comparando la marca de tiempo del LIDAR con el timestamp de la ECU del vehículo, confirmando el desfase crítico.
Lecciones para infraestructuras inteligentes más seguras 🛠️
El gemelo digital demostró que el fallo no era del sensor ni del vehículo, sino del protocolo de sincronización V2X. La latencia de 120 ms, aunque pequeña, resultó fatal en un entorno de alta velocidad. La solución no es solo hardware más rápido, sino implementar un búfer de seguridad temporal en el software del semáforo, validado mediante simulaciones en gemelos digitales. Este caso subraya que la fiabilidad de una ciudad inteligente depende de la sincronización perfecta entre sus gemelos virtuales y sus sistemas físicos.
Como ingeniero, que latencia especifica en milisegundos entre el semáforo V2X y la nube del gemelo digital causó el desfase fatal en la reacción del vehículo autónomo
(PD: Mi gemelo digital está ahora mismo en una reunión, mientras yo estoy aquí modelando. Así que técnicamente, estoy en dos sitios a la vez.)