Перелом микрохирургической иглы во время роботизированной операции ставит критический технический дилемму: произошёл ли отказ материала из-за усталости или из-за чрезмерного давления робота? Извлечённый фрагмент подвергается судебно-медицинскому анализу с помощью 3D-электронной микроскопии (ZEISS ZEN) и микро-симуляции методом конечных элементов (Abaqus). В этой статье подробно описывается рабочий процесс для определения первопричины структурного разрушения.
Судебно-медицинский рабочий процесс: от 3D-микрографии до симуляции усталости 🔬
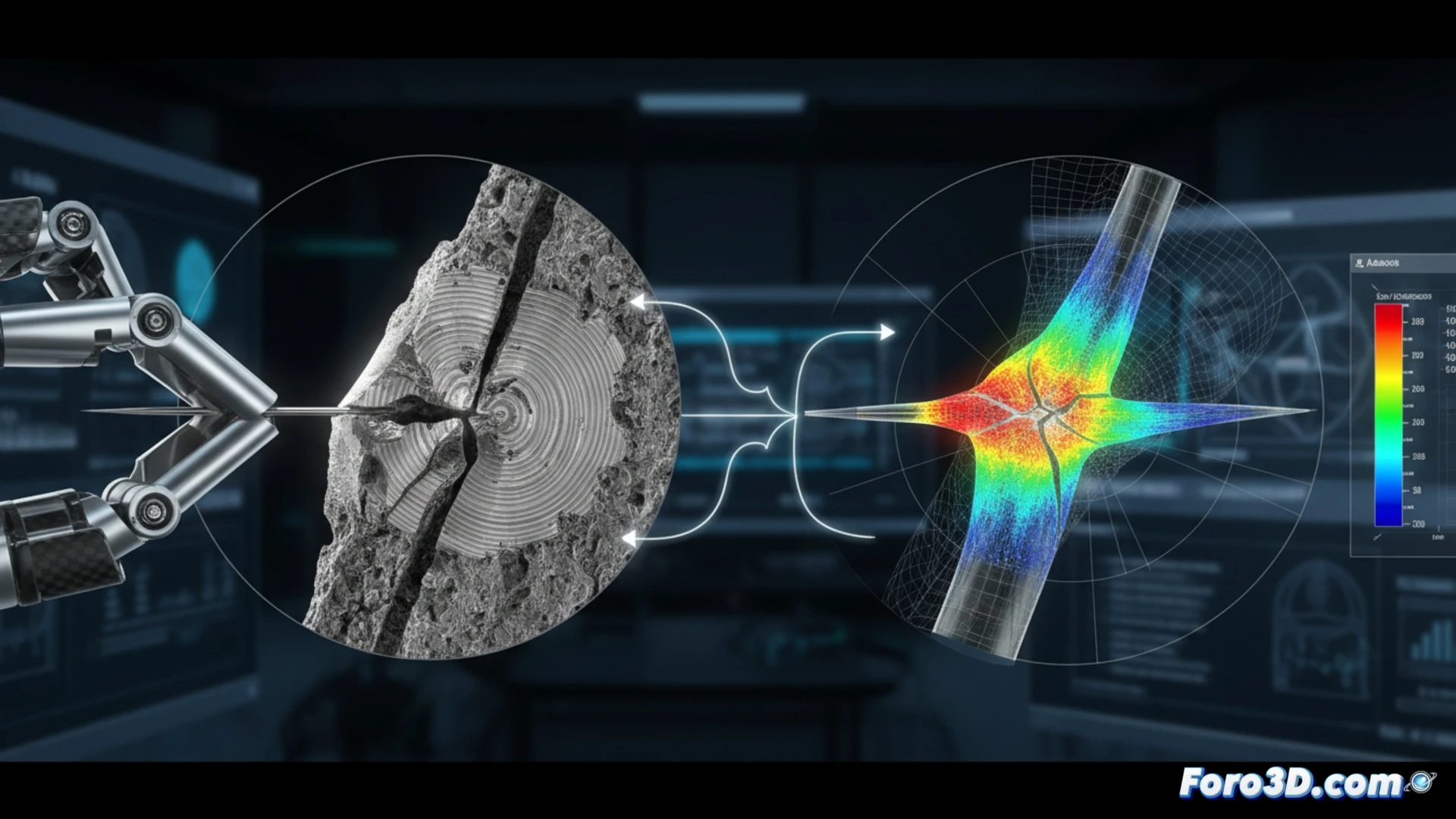
Процесс начинается с захвата топографии поверхности фрагмента в ZEISS ZEN, создавая высокоразрешающую 3D-модель, которая выявляет следы распространения трещины и усталостные бороздки. Эта модель экспортируется в Materialise Mimics для сегментации реальной геометрии и коррекции артефактов. Затем она импортируется в Abaqus для микро-FEA, который моделирует типичные циклические нагрузки роботизированного шва. Анализ сравнивает два сценария: накопленную усталость от повторяющихся циклов против точечной перегрузки, превышающей предел упругости нержавеющей стали 316L. Распределение напряжений фон Мизеса на кончике иглы определяет, совпадает ли отказ с зоной контакта с костной тканью.
Дилемма тактильной обратной связи: контролируемое давление или ошибка программного обеспечения? 🤖
Моделирование показывает, что точечная перегрузка создаёт картину хрупкого разрушения с чистыми краями, в то время как усталость вызывает прогрессирующие бороздки и локализованную пластическую деформацию. Если модель в Abaqus подтверждает, что максимальное напряжение превысило порог материала только в условиях постоянного давления, причина указывает на сбой в программном обеспечении тактильной обратной связи. Этот анализ не только оправдывает материал, но и обязывает перекалибровать алгоритмы сопротивления робота для предотвращения будущих инцидентов.
При судебно-медицинском FEA-моделировании сломанной хирургической иглы во время роботизированной операции, как можно различить отказ из-за циклической усталости, вызванной незамеченными микровибрациями, и отказ из-за точечной перегрузки, вызванной жёсткостью роботизированного привода?
(P.S.: Усталость материалов похожа на вашу после 10 часов симуляции.)