La fractura de una aguja micro-quirúrgica durante una operación robótica plantea un dilema técnico crítico: ¿falló el material por fatiga o fue la presión excesiva del robot? El fragmento recuperado se somete a un análisis forense mediante microscopía electrónica 3D (ZEISS ZEN) y micro-simulación por elementos finitos (Abaqus). Este artículo desglosa el flujo de trabajo para determinar la causa raíz del colapso estructural.
Flujo de trabajo forense: De la micrografía 3D a la simulación de fatiga 🔬
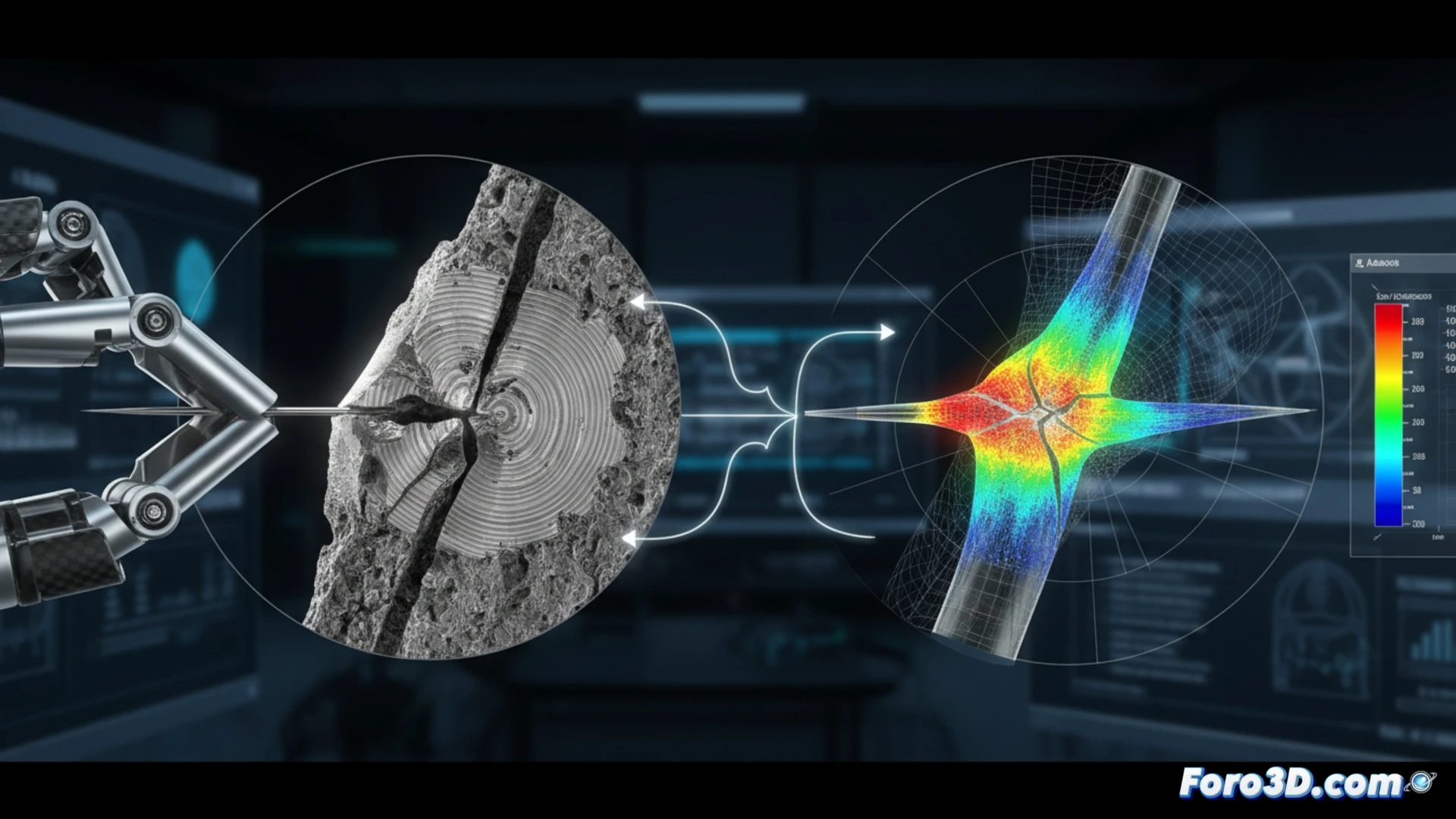
El proceso inicia con la captura de la topografía superficial del fragmento en ZEISS ZEN, generando un modelo 3D de alta resolución que revela marcas de propagación de grieta y estriaciones por fatiga. Este modelo se exporta a Materialise Mimics para segmentar la geometría real y corregir artefactos. Posteriormente, se importa a Abaqus para un micro-FEA que simula las cargas cíclicas típicas de la sutura robótica. El análisis compara dos escenarios: fatiga acumulada por ciclos repetitivos versus una sobrecarga puntual que excede el límite elástico del acero inoxidable 316L. La distribución de tensiones de Von Mises en la punta de la aguja determina si el fallo coincide con la zona de contacto contra el tejido óseo.
El dilema del feedback háptico: ¿presión controlada o error de software? 🤖
La simulación revela que una sobrecarga puntual genera un patrón de fractura frágil con bordes limpios, mientras que la fatiga produce estrías progresivas y deformación plástica localizada. Si el modelo en Abaqus confirma que la tensión máxima superó el umbral del material solo bajo condiciones de presión sostenida, la causa apunta a un fallo en el software de haptic feedback. Este análisis no solo exonera al material, sino que obliga a recalibrar los algoritmos de resistencia del robot para evitar futuros incidentes.
En una simulación FEA forense de una aguja quirúrgica fracturada durante una operación robótica, ¿cómo se puede discriminar entre una falla por fatiga cíclica debida a micro-vibraciones no detectadas y una falla por sobrecarga puntual generada por la rigidez del actuador robótico?
(PD: La fatiga de materiales es como la tuya después de 10 horas de simulación.)