Недавний сбой хирургического робота во время удаленной операции вызвал тревогу в секторе автоматизации. Инцидент, при котором скальпель совершил фатальное хаотичное движение, произошел из-за неисправности роботизированной руки. Криминалистический анализ с использованием оптической метрологии показал, что причиной стала не программная ошибка, а асимметричный микроизнос сервомоторов и шестерен, вызванный задержкой управляющего сигнала.
Прецизионная метрология: сканирование и анализ усталости 🔬
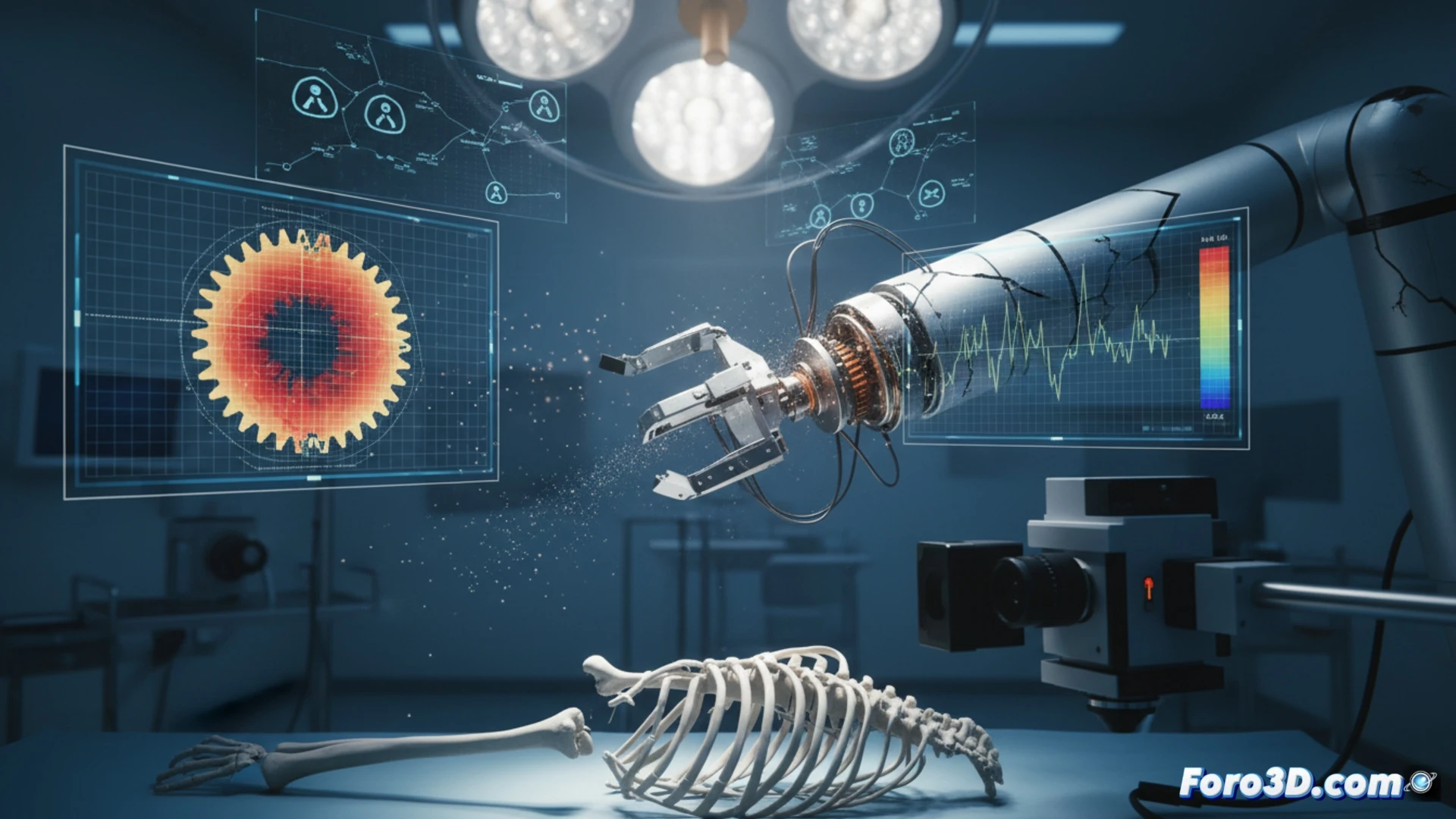
Для определения первопричины использовался сканер GOM ATOS Q для захвата геометрии сервоприводов и шестерен робота. Программное обеспечение для метрологии выявило отклонения всего в несколько микрон на контактных поверхностях — асимметричный износ, невидимый невооруженным глазом. Эта картина износа коррелировала с постоянными микровибрациями, зарегистрированными в MATLAB во время операции. Задержка управляющего сигнала, хотя и незаметная для хирурга, заставляла сервоприводы колебаться и чрезмерно корректировать, вызывая циклическую усталость зубьев сплавных шестерен. Модели в SolidWorks подтвердили, что накопленное напряжение превысило предел усталости материала, что привело к потере миллиметровой точности.
Уроки для цифровых двойников и предиктивного управления ⚙️
Этот случай демонстрирует, что хирургическая робототехника зависит не только от точности программного обеспечения, но и от механической целостности на микрометрическом уровне. Предлагаемое решение заключается во внедрении цифровых двойников в Blender и SolidWorks, которые моделируют износ в реальном времени, используя данные о задержках. Система предиктивного обслуживания, основанная на анализе спектров вибрации в MATLAB, могла бы обнаруживать эти колебания до того, как они приведут к критическому износу. Сбой произошел не из-за аппаратного обеспечения, а из-за конструкции управления, которая игнорировала механическую усталость, вызванную сетью.
Как индустрия хирургической робототехники может снизить риск микроизноса в приводах, вызванного задержкой сигнала при операциях телехирургии на больших расстояниях?
(P.S.: Симулировать роботов весело, пока они не решат не подчиняться вашим командам.)