Недавний инцидент износа хирургического роботизированного манипулятора вновь открывает дискуссию об усталости материалов в средах высокой точности. В отличие от промышленной робототехники, где отказ может остановить производственную линию, в ассистированной хирургии износ напрямую ставит под угрозу безопасность пациента. Эта техническая статья анализирует причины механического разрушения, использование цифровых двойников для моделирования циклического напряжения и стратегии предиктивного обслуживания на основе 3D-моделей.
Моделирование критических точек усталости с помощью цифровых двойников 🔧
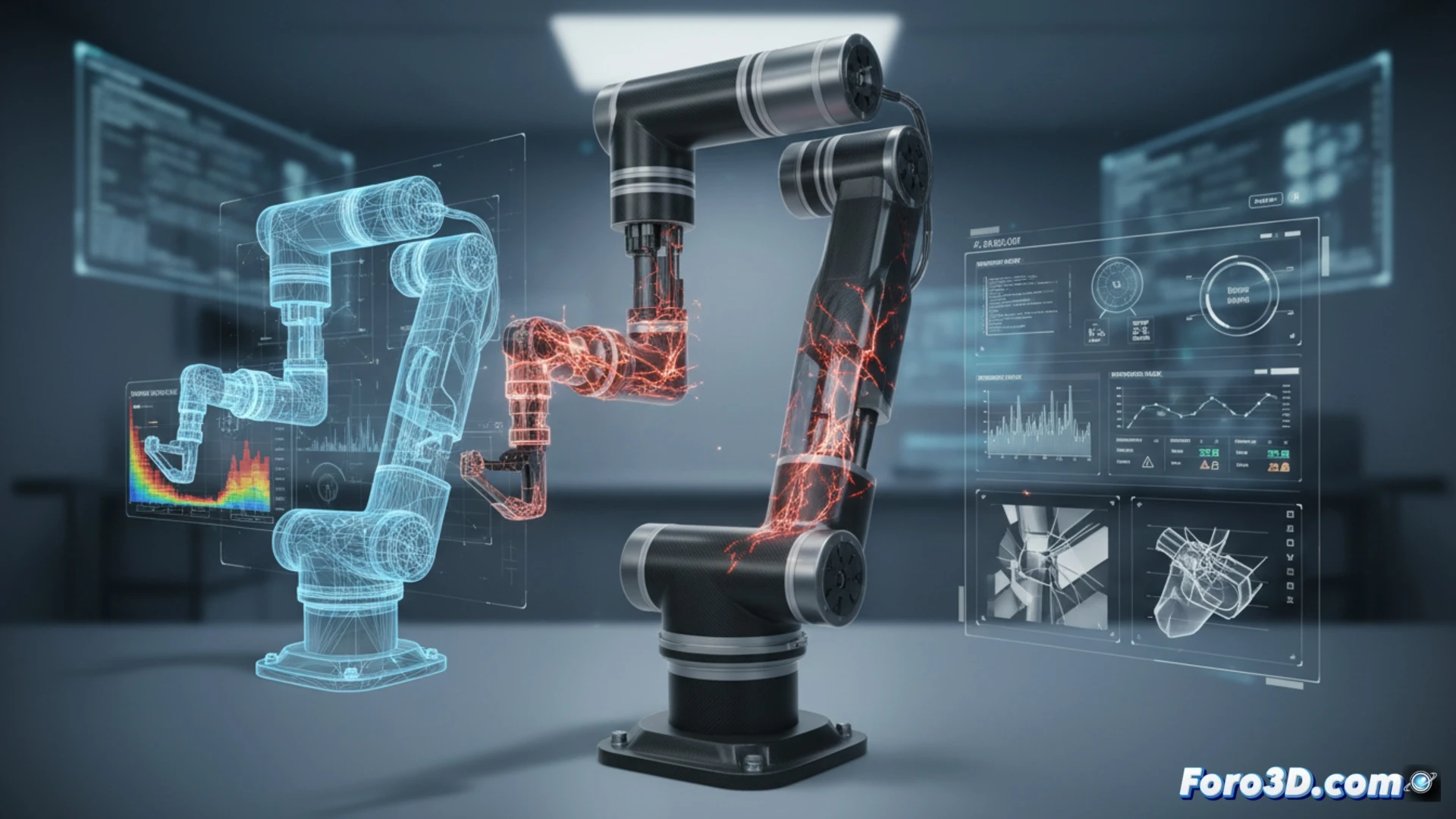
Износ хирургического роботизированного манипулятора обычно концентрируется в шаровых шарнирах и волновых редукторах, где повторяющийся крутящий момент вызывает микротрещины. С помощью симуляций методом конечных элементов, интегрированных в цифровые двойники, инженеры могут визуализировать распределение напряжений в реальном времени. Например, 3D-модель манипулятора Da Vinci позволяет определить, что локоть выдерживает на 40% больше нагрузки, чем предполагалось в первоначальных проектах. Этот метод в сочетании с вибрационными датчиками позволяет прогнозировать отказы за несколько недель, корректируя циклы смазки или замены критических компонентов до реального вмешательства.
Последствия для безопасности и дилемма реактивного обслуживания ⚠️
Главный урок этого инцидента заключается в том, что медицинская робототехника не может позволить себе реактивный подход. Каждый необнаруженный микроизнос может привести к миллиметровому отклонению во время наложения шва. Использование 3D-симуляций не только оптимизирует затраты на обслуживание, но и переопределяет протоколы сертификации. Требование, чтобы каждый хирургический манипулятор имел обновленный цифровой двойник с данными об усталости, должно стать стандартом, а не опцией. Технология для прогнозирования отказа существует; задача состоит в том, чтобы внедрить ее до того, как износ превратится в предотвратимый риск.
Учитывая недавний инцидент износа хирургического роботизированного манипулятора, какие методологии прогностического моделирования или датчики мониторинга в реальном времени можно было бы внедрить для прогнозирования механической усталости в суставах до того, как это поставит под угрозу безопасность пациента?
(PS: Симулировать роботов весело, пока они не решат не следовать вашим командам.)