Um robô autônomo de gerenciamento de bagagens atropelou um passageiro em um terminal de aeroporto durante horas de alta insolação. A investigação forense se concentrou em reconstruir o campo visual do sistema de câmeras estereoscópicas do robô para determinar se o reflexo do sol no piso polido gerou uma zona de erro de profundidade. Este caso representa um marco na aplicação de tecnologias 3D para a análise de acidentes com sistemas autônomos, onde a percepção visual falhou devido a condições ambientais extremas.
Fluxo de trabalho forense: fotogrametria, LiDAR e simulação no Unreal Engine 5 🛠️
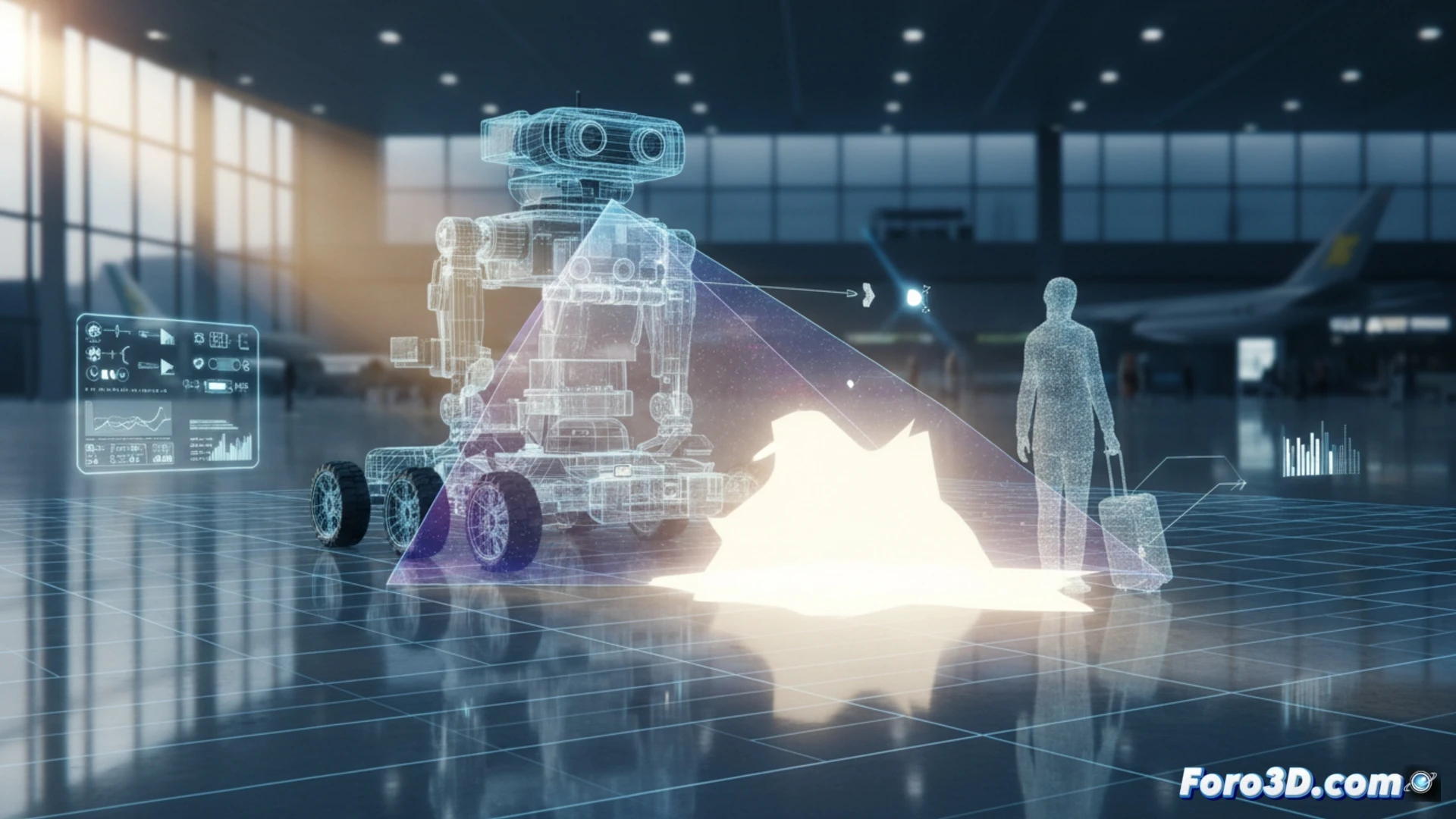
O processo começou com a captura de dados da área do acidente por meio de escaneamento LiDAR e fotogrametria com RealityCapture, gerando uma nuvem de pontos de alta densidade do piso e da zona de impacto. No CloudCompare, os dados do ambiente foram alinhados com o modelo CAD do robô para recriar a posição exata de seus sensores no momento do incidente. Em seguida, no Unreal Engine 5, o campo visual estereoscópico foi simulado, aplicando um material refletivo ao piso e configurando a iluminação solar real. A simulação confirmou que o reflexo produzia um gradiente de brilho que saturava os pixels em uma área específica, anulando a disparidade binocular e gerando um ponto cego óptico de 40 cm de diâmetro exatamente onde o passageiro estava.
Lições para o design de sensores em robótica autônoma 🤖
Esta perícia demonstra que os sistemas de visão estereoscópica, embora robustos em condições controladas, são vulneráveis a superfícies especulares e mudanças extremas de iluminação. A metodologia aplicada, combinando fotogrametria, alinhamento de nuvens de pontos e simulação de sensores, estabelece um pipeline forense reproduzível para futuros incidentes com robôs autônomos. A validação da hipótese do reflexo solar obriga os fabricantes a incorporar redundância sensorial, como LiDAR de tempo de voo, para mitigar esses pontos cegos ópticos em ambientes aeroportuários.
Como uma reconstrução 3D forense pode identificar a influência da oclusão visual por sombras projetadas na trajetória de um robô autônomo durante um sinistro em um aeroporto?
(PS: No pipeline forense, o mais importante é não misturar as provas com os modelos de referência... ou você acabará com um fantasma na cena.)