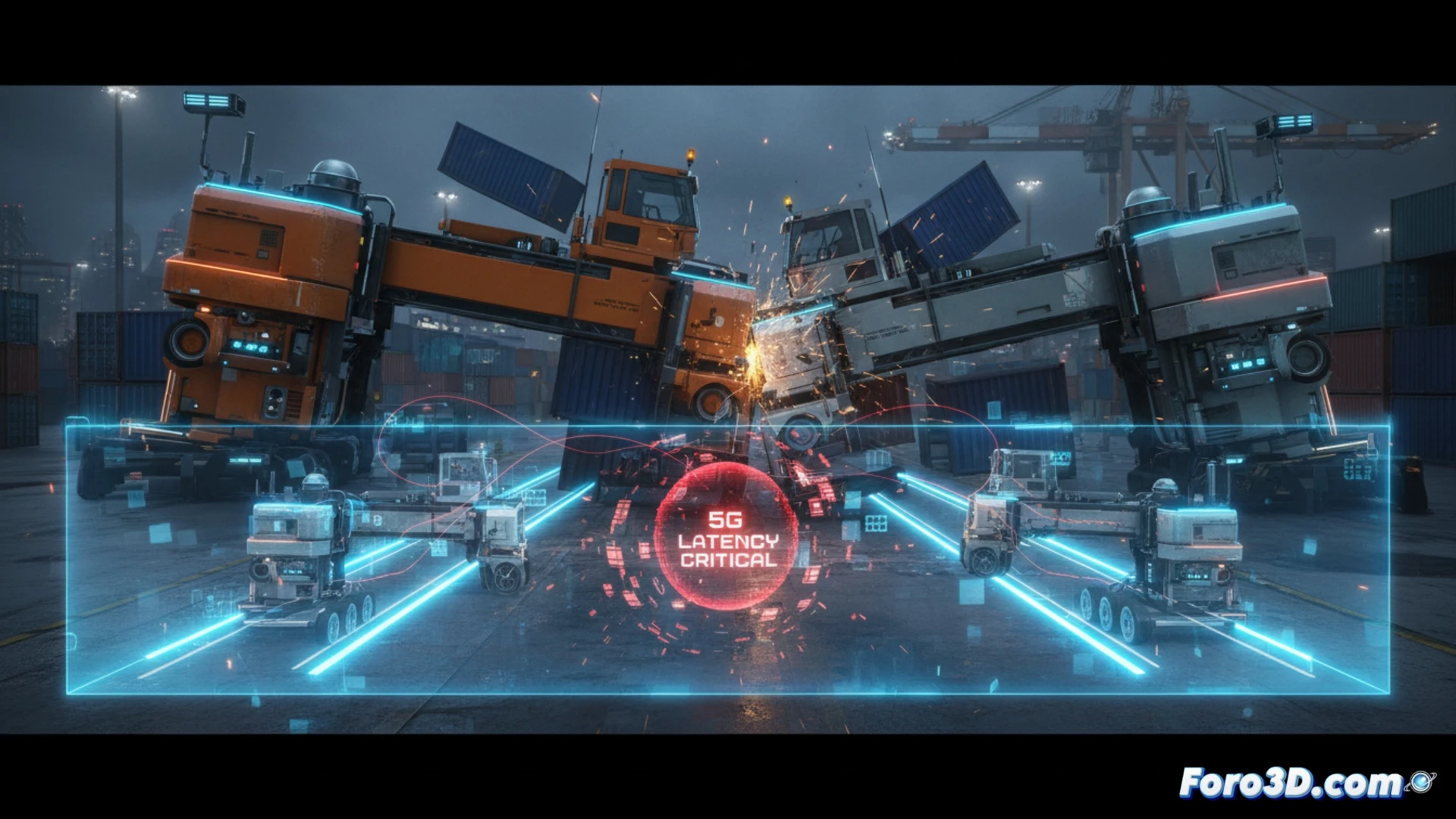
Dois Straddle Carriers colidiram em um terminal portuário autônomo, um incidente que parecia uma falha mecânica até que a reconstrução 3D dos logs de sensores fusionados (LiDAR e Radar) apontou para uma causa mais sutil. A simulação no Gazebo e Unreal Engine 5 permitiu que os engenheiros recriassem o momento exato do impacto, revelando que o gêmeo digital da área de manobras mostrava uma posição incorreta de uma das máquinas. A discrepância se originou por uma latência crítica na rede 5G que dessincronizou os dados em tempo real.
Reconstrução forense com Gazebo e Unreal Engine 5 🛠️
O processo de investigação começou com a extração de dados brutos dos sistemas LiDAR e Radar embarcados em cada carretilha pórtico. Esses dados foram importados para o Gazebo para uma primeira simulação cinemática, onde se observou que as trajetórias registradas não coincidiam com o plano de rota. Posteriormente, a nuvem de pontos fusionada foi carregada no Unreal Engine 5, utilizando o plugin da Leica Cyclone para gerenciar a alta densidade de pontos. A visualização no gêmeo digital mostrou que um dos veículos aparecia em uma localização virtual distinta da sua posição real no momento da colisão. A latência da rede 5G, medida em microssegundos, havia provocado que o sistema de controle recebesse uma atualização de posição defasada, gerando uma ordem de movimento errônea.
Sincronização de dados como pilar da segurança autônoma ⏱️
Este incidente ressalta que a confiabilidade de um gêmeo digital não depende apenas da precisão do modelo 3D, mas da sincronização temporal dos fluxos de dados. A fusão de sensores LiDAR e Radar demonstrou ser vital para detectar a anomalia, mas a rede 5G atuou como um gargalo. Para evitar futuras colisões, propõe-se implementar um sistema de carimbo temporal (timestamping) a nível de hardware em cada sensor e um buffer de compensação de latência no gêmeo digital. A lição é clara: em logística autônoma, a velocidade da simulação deve igualar a velocidade do mundo físico.
Como demonstra o incidente no terminal portuário autônomo, onde a latência 5G provocou a colisão de dois Straddle Carriers apesar de um gêmeo digital preditivo, qual limiar de latência máxima em milissegundos vocês consideram crítico para que um gêmeo digital industrial em logística 3D possa evitar colisões entre pórticos em tempo real, e que soluções propõem para medir e mitigar esse parâmetro?
(PS: simular uma planta industrial é como jogar The Sims, mas sem piscinas para tirar a escada)