A acumulação de organismos incrustantes, ou biofouling, representa um desafio crítico para a operacionalidade de veículos submersíveis, afetando sua hidrodinâmica e aumentando o consumo energético. A solução moderna reside nos gêmeos digitais: réplicas virtuais que integram dados em tempo real de sensores de pressão, temperatura e câmeras subaquáticas para modelar o crescimento de algas, cracas e moluscos sobre o casco. Este artigo técnico detalha a arquitetura de um gêmeo digital aplicado ao monitoramento preditivo de biofouling, transformando um problema biológico em um ativo de dados gerenciável.
Arquitetura do Gêmeo Digital e Modelagem Preditiva 🌊
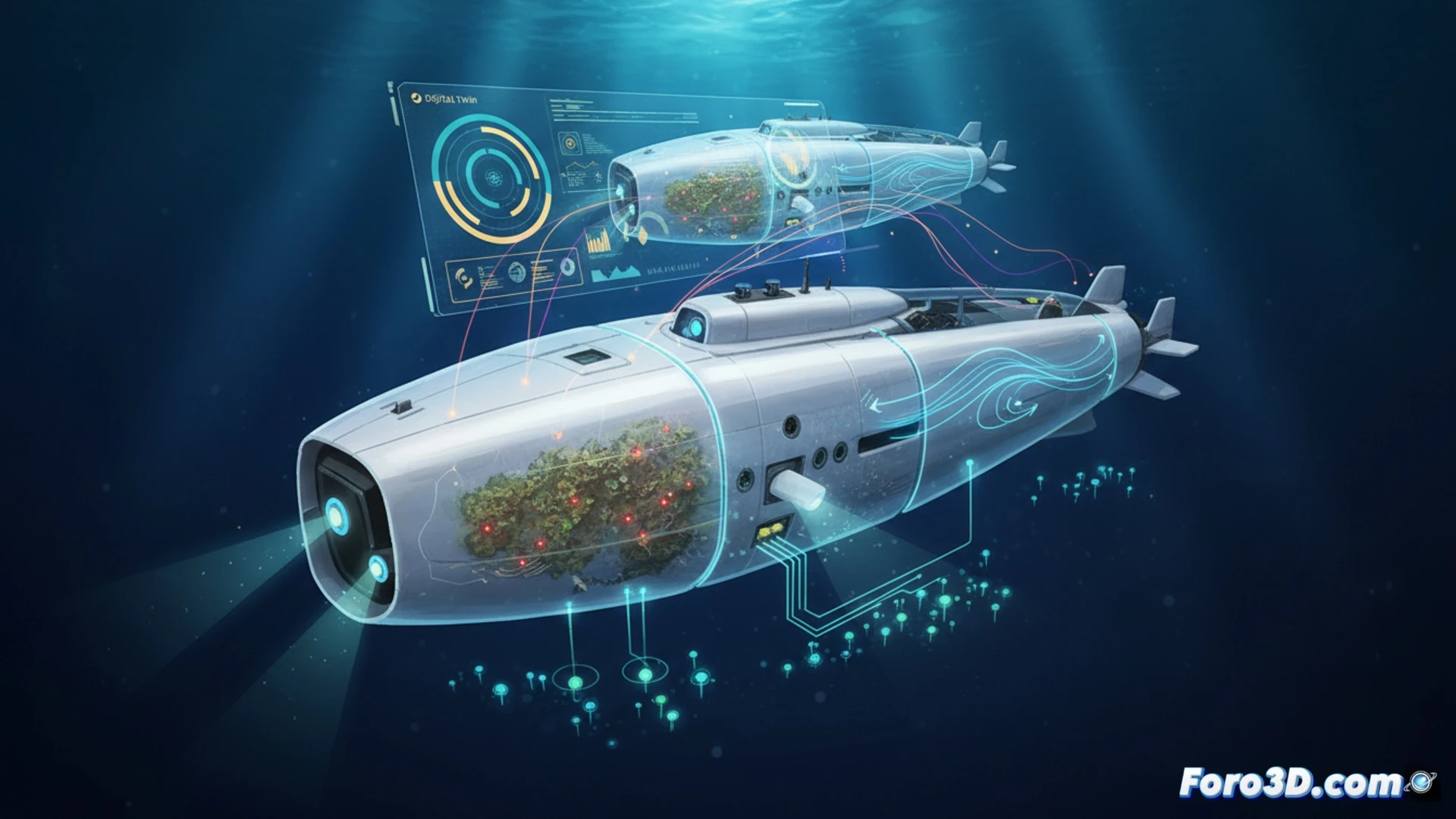
A construção do gêmeo digital começa com a aquisição de dados por meio de sensores IoT colocados em pontos estratégicos do submersível, como a hélice, as tomadas de água e as superfícies de controle. Esses sensores registram parâmetros como temperatura superficial, pressão hidrostática e fluxo local, enquanto as câmeras de alta resolução capturam imagens para segmentar e quantificar a cobertura de organismos. O motor de simulação, desenvolvido em Unity ou Unreal Engine, utiliza esses dados para alimentar um modelo de dinâmica de fluidos computacional (CFD) reduzido, capaz de prever pontos críticos de incrustação. O gêmeo digital é atualizado a cada hora, permitindo que os operadores visualizem em 3D a evolução do biofouling e recebam alertas precoces quando a rugosidade do casco ultrapassa um limiar predefinido, otimizando assim as rotas de manutenção e reduzindo custos operacionais em até 20%.
O Oceano como Laboratório Virtual 🐟
Além da eficiência técnica, essa abordagem nos obriga a repensar a relação entre a engenharia e os ecossistemas marinhos. Ao integrar organismos vivos em um gêmeo digital, transformamos o biofouling de um inimigo a ser eliminado em um indicador biológico de saúde oceânica. Um aumento repentino de incrustações pode sinalizar mudanças na temperatura da água ou na disponibilidade de nutrientes, alertando sobre possíveis alterações ambientais. Assim, o submersível deixa de ser apenas uma máquina para se tornar um sensor de seu próprio ambiente, fundindo o monitoramento industrial com a ciência cidadã em um mesmo modelo virtual.
Como se pode integrar um gêmeo digital com sensores de impedância e visão computacional para prever em tempo real a distribuição e espessura do biofouling na superfície de um submersível?
(PS: Meu gêmeo digital está agora mesmo em uma reunião, enquanto eu estou aqui modelando. Então, tecnicamente, estou em dois lugares ao mesmo tempo.)