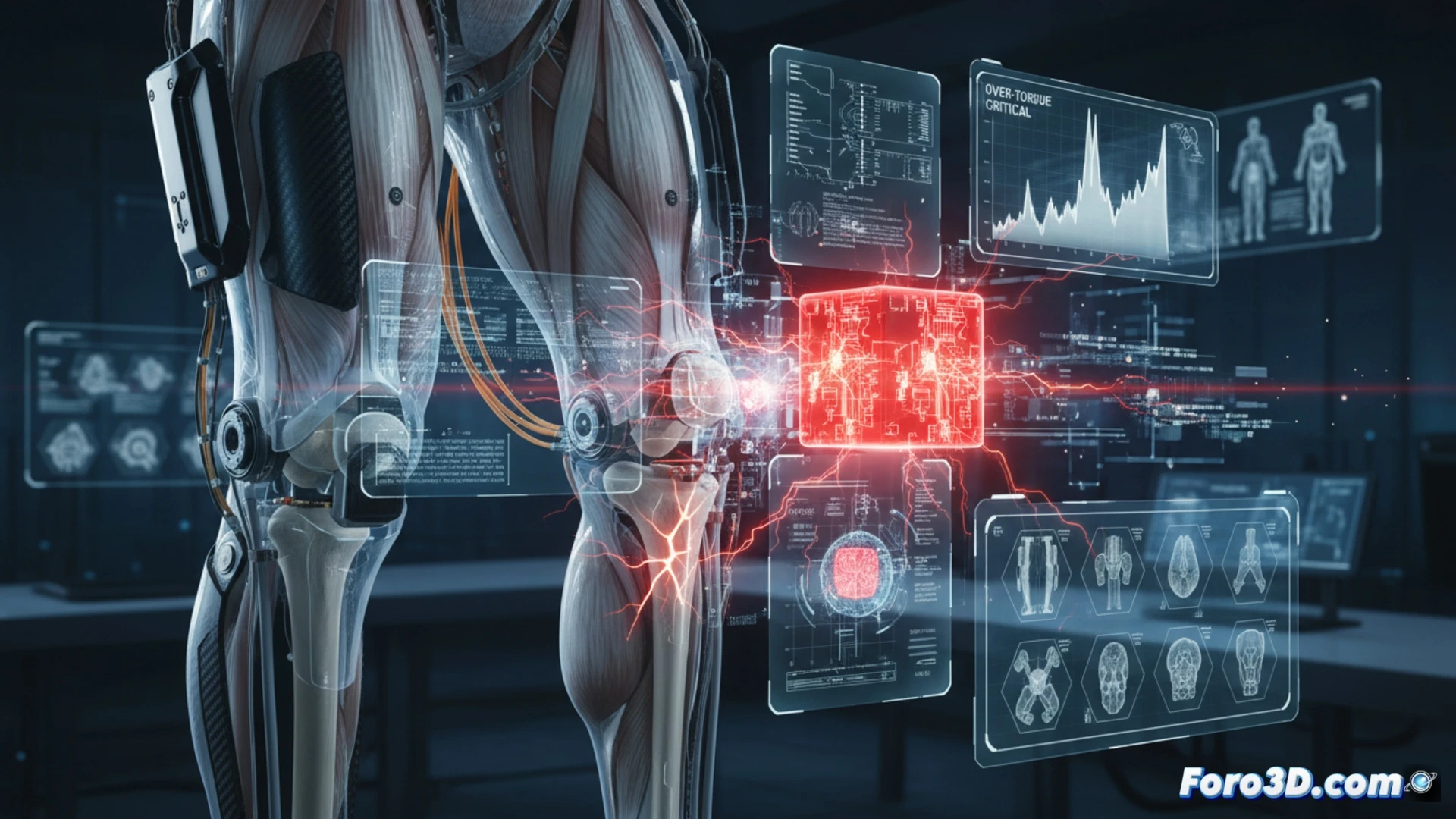
Um paciente sofreu uma fratura óssea durante uma sessão de reabilitação com um exoesqueleto robótico. O incidente, aparentemente inexplicável, foi analisado por meio de uma reconstrução cinemática tridimensional do dispositivo. Os engenheiros cruzaram os dados de movimento capturados com os registros biomédicos do paciente, descobrindo um sobre-torque crítico na articulação do joelho. A causa: um sensor de resistência que enviava leituras errôneas ao sistema de controle.
Fluxo de trabalho técnico: da nuvem de pontos à simulação 🛠️
A equipe utilizou o Artec Studio para escanear o exoesqueleto e gerar uma malha precisa do mecanismo danificado. Este modelo foi importado para o Autodesk Fusion 360, onde a cinemática da articulação foi reconstruída e as cargas aplicadas durante a marcha assistida foram simuladas. Para a análise biomecânica, os dados de movimento do paciente foram processados no OpenSim, calculando os momentos articulares reais. A discrepância entre o torque esperado (segundo a leitura do sensor) e o torque real (simulado) evidenciou a falha. Finalmente, usou-se o Blender para visualizar a sequência do incidente, sobrepondo a deformação óssea com a cinemática do exoesqueleto.
Lições para a segurança em dispositivos médicos ⚠️
Este caso demonstra que a validação virtual é indispensável antes de qualquer uso clínico prolongado. A combinação de escaneamento 3D, simulação biomecânica e animação forense permite detectar falhas de projeto ou sensores que colocam o paciente em risco. Para os desenvolvedores de exoesqueletos, integrar um gêmeo digital atualizado em tempo real poderia prevenir futuras fraturas. A tecnologia 3D não apenas reconstrói o passado, mas protege o futuro da reabilitação assistida.
Que implicações tem para o design de futuros exoesqueletos de reabilitação o fato de a reconstrução 3D da falha ter revelado um sensor defeituoso como causa da fratura óssea
(PS: Se você imprimir um coração em 3D, certifique-se de que ele bata... ou pelo menos que não cause problemas de direitos autorais.)