Durante uma cirurgia assistida pelo sistema DaVinci Next, um braço robótico executou um movimento não comandado, comprometendo a segurança do procedimento. O incidente ativou uma análise forense profunda que combinou a simulação com RoboGuide, o estudo do gêmeo digital do robô e a inspeção de micro-servos por microscopia 3D Keyence VHX, revelando falhas incipientes não detectáveis pelo software de diagnóstico padrão.
Reconstrução do Movimento Não Comandado com RoboGuide e MATLAB 🤖
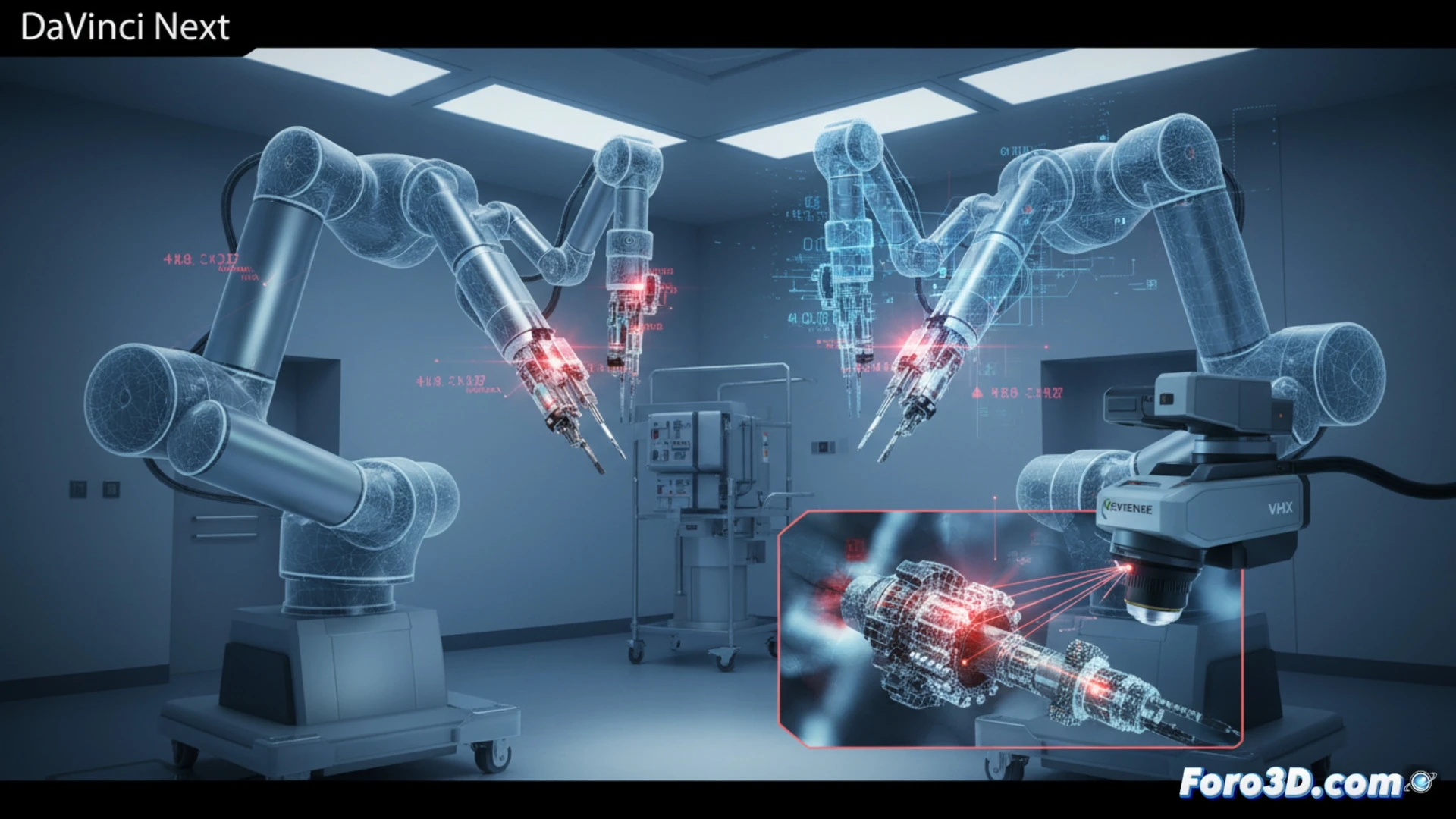
A equipe de engenharia carregou os logs de telemetria do robô no MATLAB para identificar a sequência exata de comandos e desvios. Foi detectado um pico de corrente anômalo em um micro-servo do braço número 3. Para visualizar a cinemática da falha, o modelo do gêmeo digital foi importado para o RoboGuide, recriando a trajetória indesejada. A simulação confirmou que o desvio angular coincidia com uma micro-fratura na engrenagem planetária do servo, visível apenas sob o microscópio 3D Keyence VHX com 500 aumentos, onde as marcas de desgaste por fadiga do material eram evidentes.
Lições para a Manutenção Preditiva em Automação Médica 🔬
Este caso demonstra que a confiabilidade em robótica cirúrgica não pode depender apenas de testes funcionais. A integração de gêmeos digitais com simulação em RoboGuide e análise microscópica 3D permite criar modelos de desgaste preditivo. Ao correlacionar os logs do MATLAB com as imagens da Keyence, é possível estabelecer limites de vibração ou corrente que antecipem falhas catastróficas. Para o setor, isso implica adotar uma abordagem híbrida de inspeção física e digital, elevando os padrões de segurança em automação.
É possível prever a falha de um braço robótico DaVinci Next durante uma cirurgia por meio da integração em tempo real de um gêmeo digital com dados de microscopia de desgaste mecânico? 🏥
(PS: Simular robôs é divertido, até que eles decidem não seguir suas ordens.)