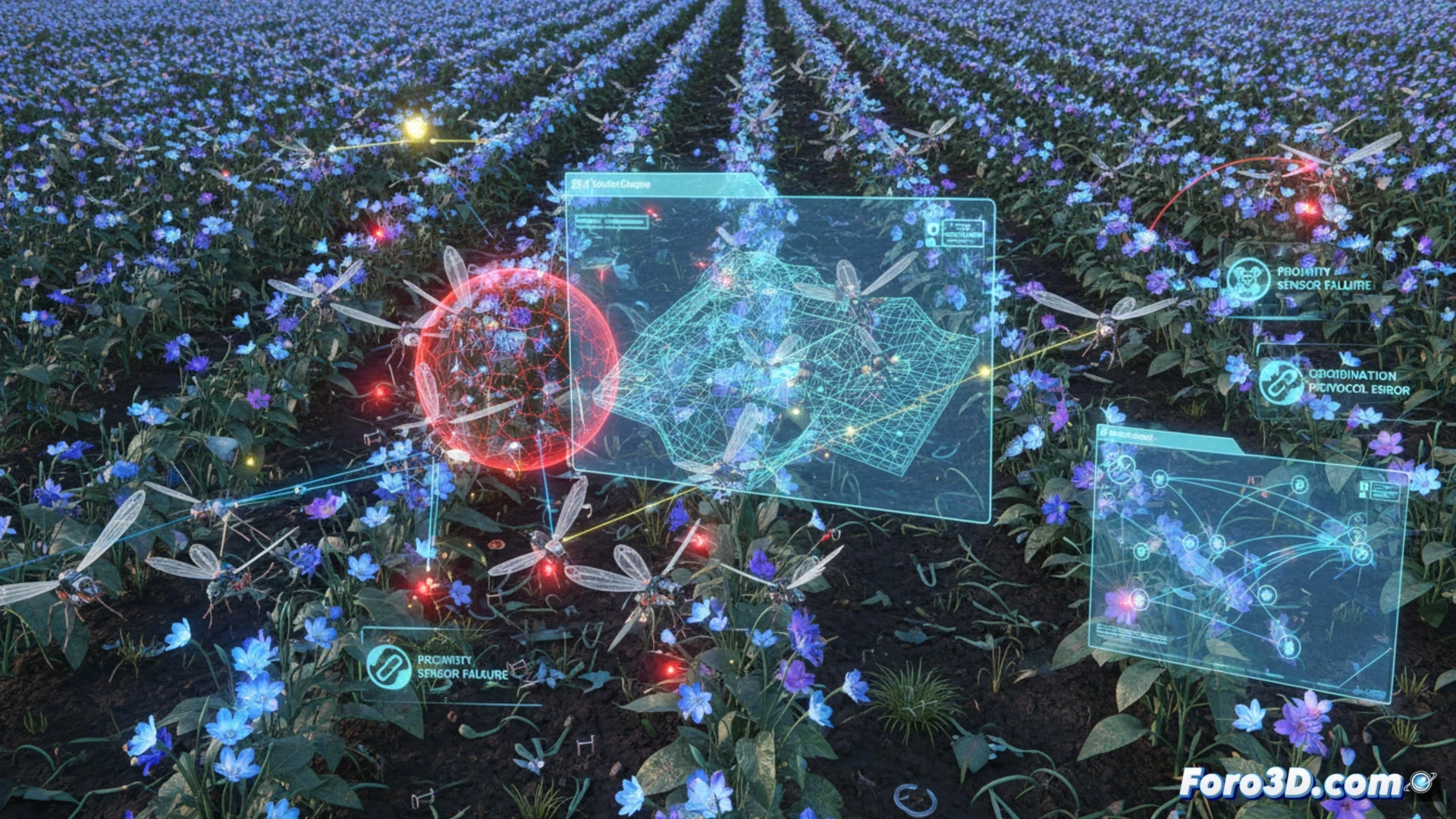
Um enxame de micro-drones polinizadores destruiu uma colheita experimental após uma falha catastrófica. A reconstrução 3D do incidente, utilizando ferramentas como RealityCapture e 3ds Max, permite analisar as trajetórias de voo e os dados de sensores de proximidade. Este caso expõe vulnerabilidades críticas na automação de cultivos intensivos, onde a coordenação entre robôs é essencial para evitar colisões e garantir a polinização eficaz.
Simulação de trajetórias e sensores no V-REP e Gazebo 🤖
Para entender a falha, é necessário modelar o comportamento do enxame em ambientes de simulação robótica. O V-REP permite recriar a física de voo dos micro-drones e programar algoritmos de evitação de obstáculos baseados em sensores ultrassônicos ou LiDAR. O Gazebo, por sua vez, oferece um ambiente mais realista para testar a interação entre múltiplos agentes e o cultivo. Neste caso, a reconstrução 3D sugere que um erro na calibração dos sensores de proximidade provocou uma dessincronização no enxame, levando os drones a colidirem entre si e com as plantas, em vez de polinizá-las.
Lições para a robótica agrícola 🌱
A falha não é um incidente isolado, mas um reflexo dos desafios atuais na robótica agrícola. A dependência de sensores de baixo custo para manter a viabilidade econômica dos enxames introduz riscos de mau funcionamento. A simulação prévia no V-REP e Gazebo deve incluir cenários de ruído de sensor e perda de comunicação. Somente através de uma análise 3D detalhada e uma validação rigorosa dos algoritmos de voo poderemos evitar que a próxima colheita experimental se transforme em um campo de destroços.
Qual foi o papel dos algoritmos de evitação de colisões em 3D na propagação da falha do enxame e como seu comportamento caótico poderia ter sido modelado durante a reconstrução virtual do sinistro?
(PS: Simular robôs é divertido, até que eles decidam não seguir suas ordens.)