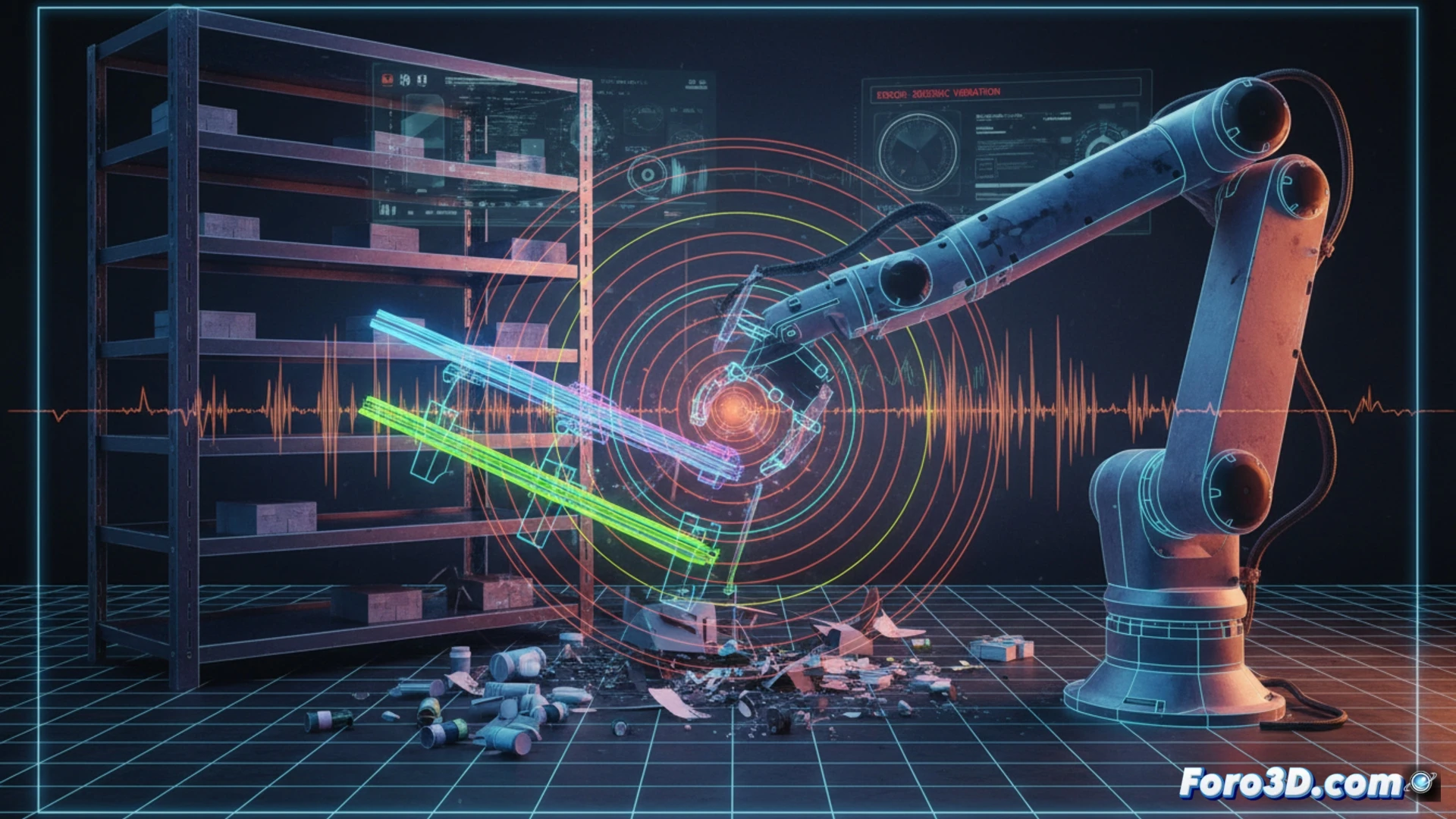
O incidente ocorreu em uma farmácia robotizada de alta velocidade: o braço robótico colidiu violentamente contra as prateleiras do sistema de armazenamento vertical. À primeira vista, parecia um erro de programação, mas a equipe de manutenção suspeitou de um fator externo. A análise 3D revelou deformações milimétricas nos trilhos guia, causadas por vibrações sísmicas não registradas pelos sensores padrão do edifício.
Metodologia de inspeção com RoboGuide, RealWorks e CloudCompare 🤖
O diagnóstico começou no RoboGuide, onde a trajetória original do braço foi simulada. Ao compará-la com os dados de telemetria do CLP, foi detectado um desvio de 2,3 mm no eixo Z. Para confirmar a causa, os trilhos foram escaneados com um scanner a laser Trimble e as nuvens de pontos foram processadas no Trimble RealWorks. O alinhamento das superfícies mostrou um abaulamento no trilho esquerdo. Usando o CloudCompare, foi realizada uma comparação de distâncias (M3C2) entre o estado atual e o projeto CAD original, calculando deformações de até 1,8 mm na zona de impacto. O Blender serviu para gerar uma animação forense que correlaciona o momento da vibração sísmica com a trajetória do efetuador final.
Lições para a calibração de sistemas automatizados ⚙️
Este caso demonstra que os sistemas robotizados em farmácia exigem um monitoramento estrutural além dos sensores internos do robô. As vibrações sísmicas de baixa amplitude, embora não danifiquem o edifício, podem descalibrar trilhos de precisão. Recomenda-se integrar acelerômetros na base das prateleiras e realizar escaneamentos 3D periódicos com o CloudCompare para detectar deformações sub-milimétricas antes que gerem colisões. A correção envolveu reajustar as ancoragens dos trilhos e recalibrar o braço no RoboGuide com um novo mapa de compensação de erros.
Quão confiável é o modelo de análise 3D de colisão para prever trajetórias de um braço robótico farmacêutico quando confrontado com vibrações sísmicas não modeladas inicialmente no ambiente da farmácia robotizada
(PS: Simular robôs é divertido, até que eles decidem não seguir suas ordens.)