O recente incidente de congestionamento em uma farmácia robótica não é apenas uma anedota técnica, mas um estudo de caso perfeito para a logística industrial. Neste artigo, analisamos como a visualização 3D permite identificar o ponto exato de bloqueio no fluxo de medicamentos, desde o armazém automatizado até o dispensador final, oferecendo um roteiro para a otimização do sistema.
Mapeamento do fluxo logístico e ponto de bloqueio 🚧
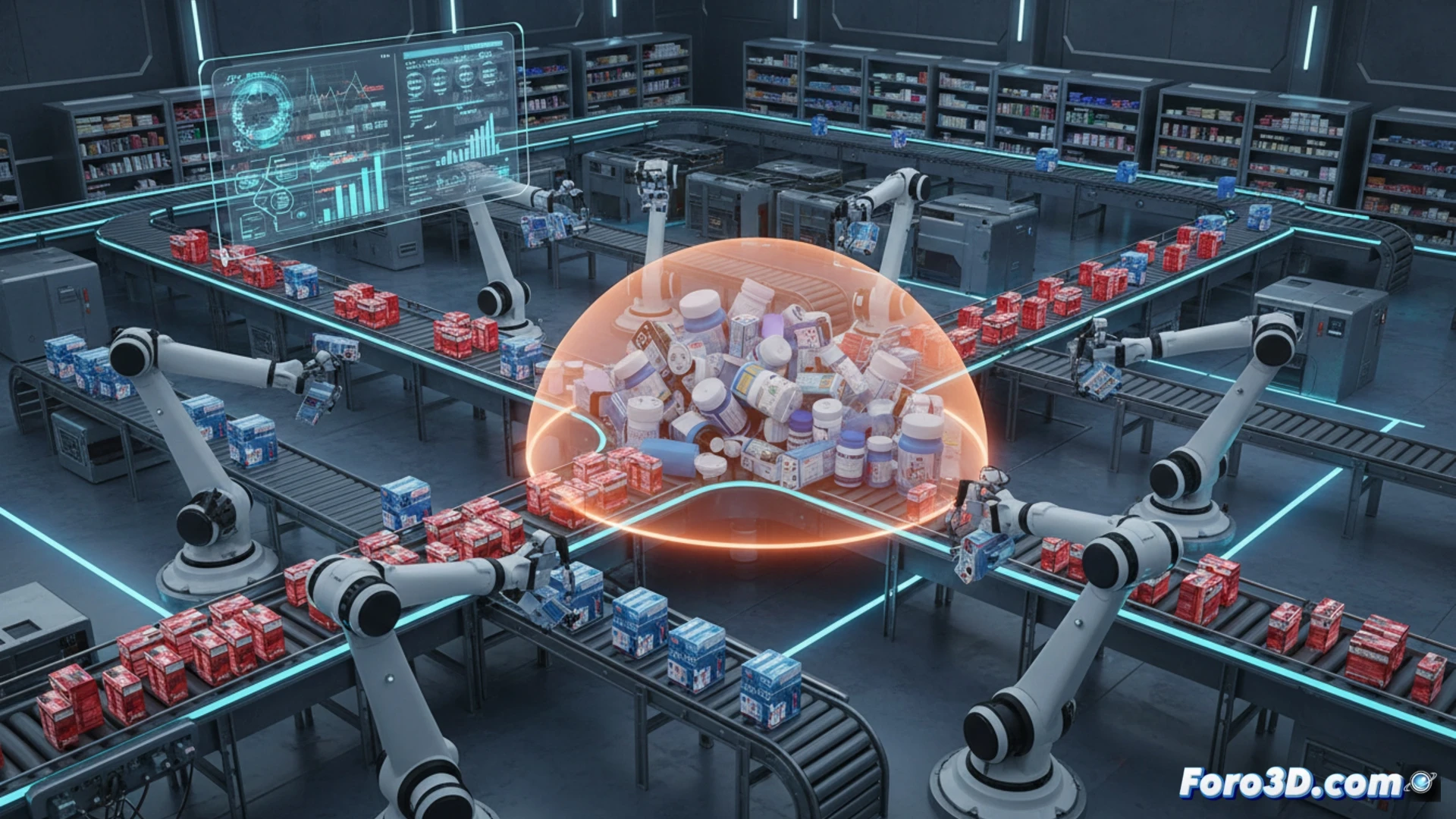
Para compreender o congestionamento, devemos modelar em 3D o percurso do produto. O processo inicia na estante robótica, onde um braço pneumático extrai o blister. Este passa para uma esteira transportadora de velocidade variável que o direciona para uma tremonha de classificação. O ponto crítico geralmente se localiza na interseção entre a esteira e a tremonha, onde a geometria da embalagem ou o acúmulo de poeira gera um atrito excessivo. Através da simulação por elementos discretos (DEM), podemos visualizar o acúmulo de unidades e prever o momento exato do colapso do fluxo.
Redesenho preditivo para evitar paradas 🔧
A solução não é apenas limpar o sensor, mas redesenhar o gargalo. Ao simular em 3D a inclinação da tremonha e a textura da superfície da esteira, descobrimos que um ângulo de 35 graus com um revestimento antiaderente reduz os congestionamentos em 80 por cento. Esta abordagem, baseada no gêmeo digital da farmácia, permite realizar manutenção preditiva e ajustar os parâmetros do braço robótico antes que ocorra uma interrupção real na cadeia de suprimentos.
Como a simulação 3D de congestionamentos em farmácias robóticas poderia prever e resolver gargalos na logística industrial de alta rotação de inventário?
(PS: simular uma planta industrial é como jogar The Sims, mas sem piscinas para tirar a escada)