O recente incidente em que um robô minerador de grande tonelagem sofreu uma ruptura catastrófica em seu braço articulado durante uma operação de extração colocou o foco nas falhas mecânicas em ambientes extremos. Esse tipo de maquinário, projetado para suportar cargas cíclicas e condições abrasivas, falhou repentinamente, o que sugere um colapso por fadiga de materiais ou uma sobrecarga não detectada pelo sistema de controle. Analisar esse evento sob a ótica da engenharia nos permite entender como otimizar o projeto e a supervisão desses equipamentos.
Fadiga de materiais, sobrecarga e erros de software na falha ⚙️
As causas técnicas dessa ruptura podem ser divididas em três frentes principais. Primeiro, a fadiga de materiais: o robô minerador opera sob vibrações e impactos constantes, o que gera microfissuras em ligas de aço ou alumínio que, com o tempo, resultam em uma fratura frágil. Segundo, a sobrecarga operacional: se o sistema de sensores não calibrou corretamente o peso do material extraído ou o robô excedeu seu torque máximo em uma rotação forçada, o estresse nos atuadores e juntas ultrapassou o limite elástico. Terceiro, um possível erro de software no controle de trajetórias, onde um loop de realimentação defeituoso ordenou um movimento brusco sem compensar a inércia, gerando um pico de tensão no ponto crítico da estrutura.
Como a simulação 3D e os gêmeos digitais evitam essas falhas 🛠️
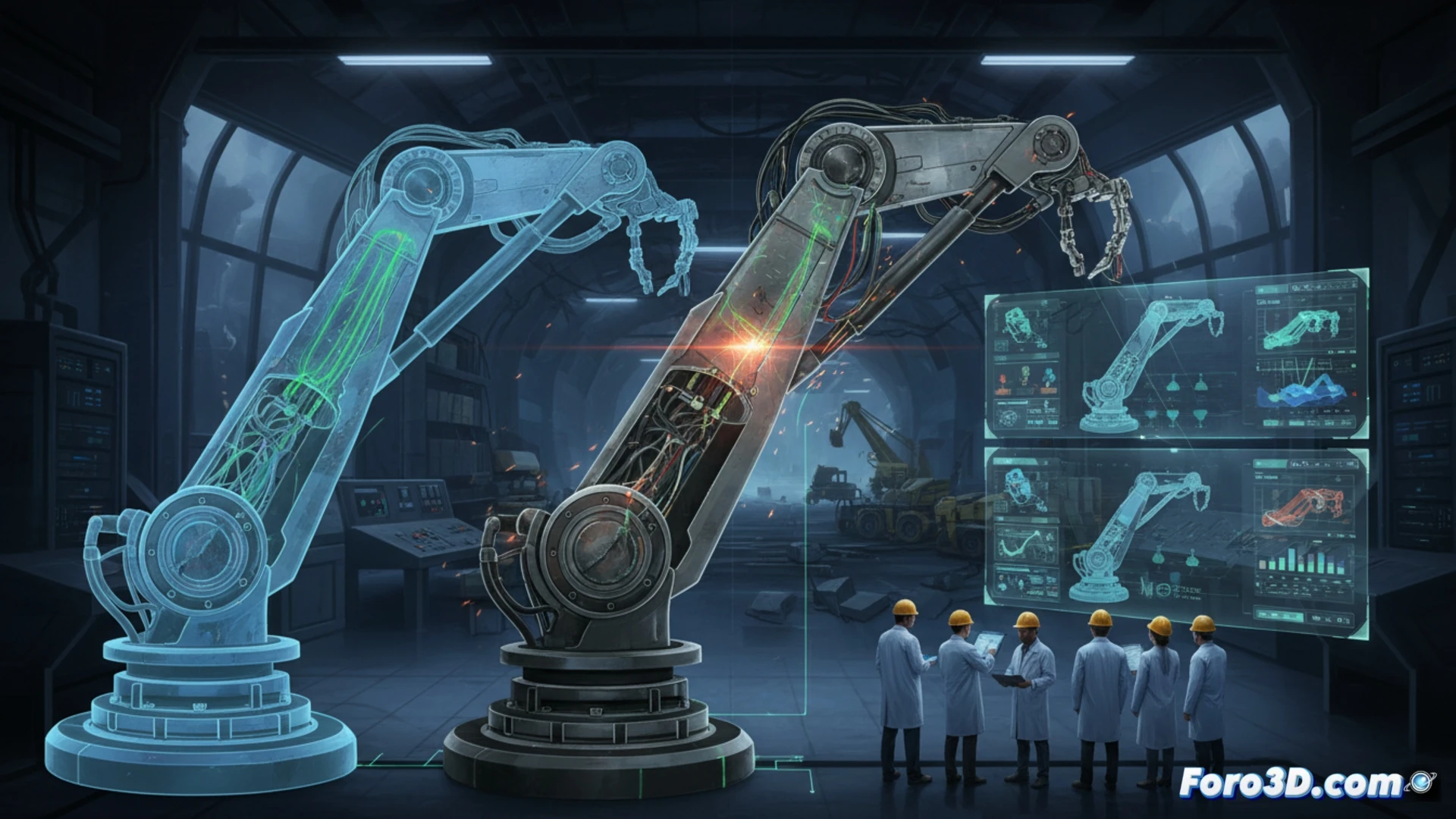
A simulação por meio de gêmeos digitais é a ferramenta chave para prever e prevenir essa ruptura. Ao modelar o robô em 3D com dados de tensão-deformação, é possível visualizar mapas de calor que indicam os pontos críticos onde a fadiga se acumula, como as juntas esféricas ou as soldas do braço. Um gêmeo digital permite executar milhares de ciclos de carga virtuais sem desgastar o equipamento real, identificando sobrecargas antes que ocorram. Além disso, integra dados de sensores IoT para alertar sobre vibrações anômalas, parando a máquina ao primeiro sinal de microfissura, evitando assim rupturas catastróficas em mineração automatizada.
Como um gêmeo digital pode prever e prevenir com exatidão os modos de falha por fadiga em um braço articulado de robô minerador antes que ocorra uma ruptura catastrófica, considerando variáveis como a carga dinâmica e a abrasão do ambiente subterrâneo?
(PS: Simular robôs é divertido, até que eles decidem não seguir suas ordens.)