Um modelo 3D prévio elimina pontos cegos em segurança
Planejar um sistema de vigilância eficaz não depende mais de suposições. Os especialistas agora constroem um gêmeo digital do espaço real usando tecnologias de escaneamento 3D. Este modelo se torna o campo de testes definitivo para projetar, testar e refinar cada componente antes de sua instalação física, eliminando o erro humano. 🎯
Criar a base digital com precisão milimétrica
O primeiro passo é capturar a realidade. Um escâner a laser, como o Leica RTC360, registra a geometria completa de um ambiente, por exemplo, um museu. Este dispositivo gera uma nuvem de pontos extremamente densa e precisa. Os técnicos então processam esses dados em software especializado, como Autodesk ReCap, para gerar um modelo 3D sólido e pronto para uso. Esta réplica virtual contém cada coluna, vitrine e corredor com exatidão.
Vantagens chave do escaneamento inicial:- Precisão absoluta: São capturadas dimensões e obstáculos sem margem de erro.
- Documentação completa: Obtém-se um registro 3D permanente do estado do local.
- Base para simulações: O modelo é o ambiente onde será testado todo o sistema.
O verdadeiro ladrão em segurança é a suposição de que colocar câmeras ao acaso funciona. A simulação 3D deixa sem argumentos a improvisação.
Simular e analisar a cobertura no motor 3D
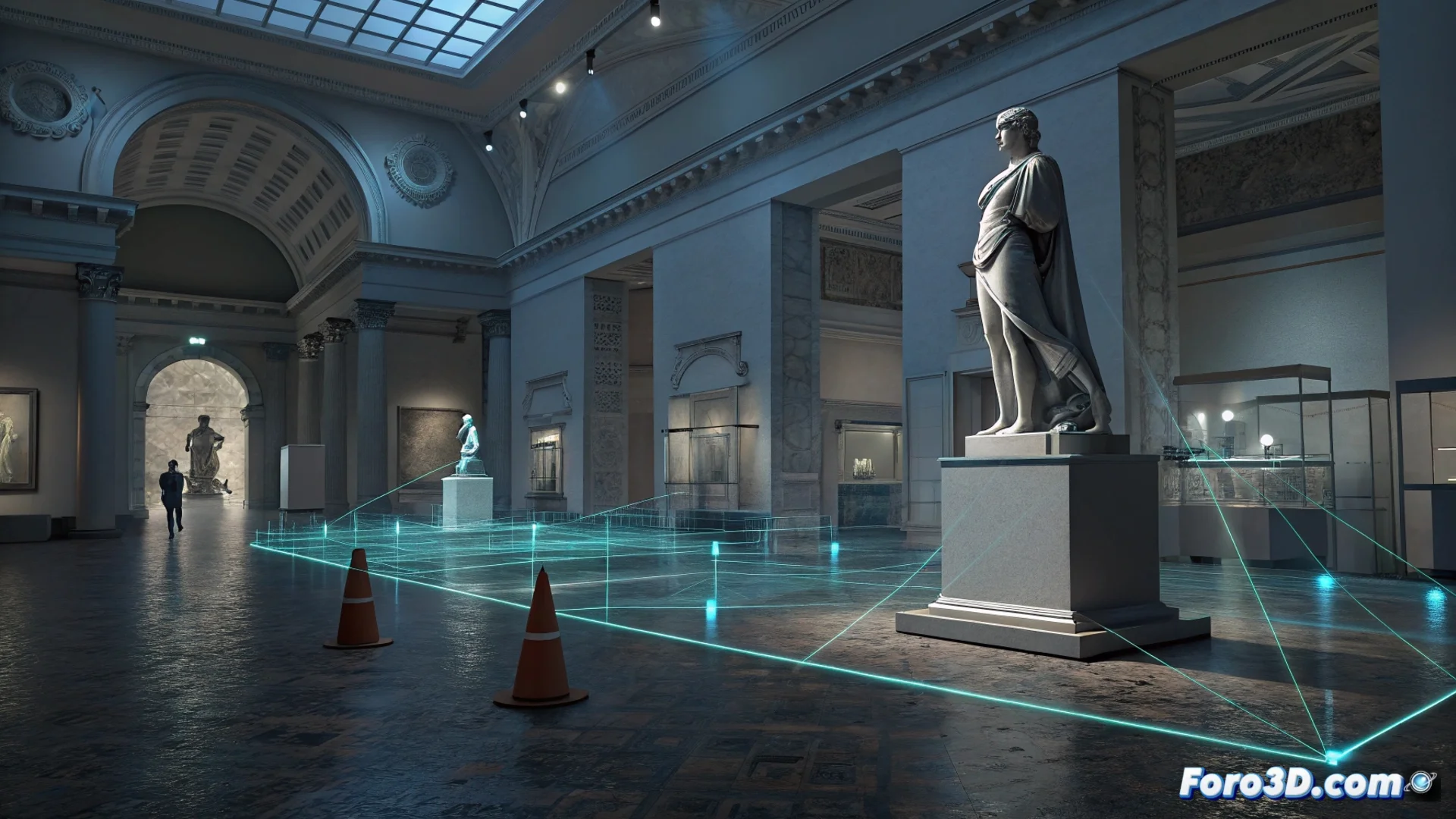
Com o modelo 3D carregado em um motor como Unreal Engine ou Unity, começa a fase de design ativo. Os planejadores colocam câmeras de vigilância virtuais nas localizações propostas. Configuram parâmetros técnicos reais: distância focal, resolução, ângulo de inclinação e campo de visão. O software renderiza a perspectiva de cada câmera, calculando automaticamente as zonas cobertas e, de forma crítica, as sombras e obstruções geradas pelos objetos do ambiente. Assim, revelam-se os corredores ou cantos onde uma pessoa poderia se mover sem ser detectada: os pontos cegos.
Parâmetros que são simulados:- Campo de visão (FOV) e alcance efetivo de cada câmera.
- Efeito de obstáculos arquitetônicos e mobiliário.
- Interação da iluminação ambiente com a visão da câmera.
Otimizar o design e validar a instalação
Identificar os pontos cegos permite iterar o design imediatamente. Os técnicos ajustam posições, mudam tipos de lente ou adicionam dispositivos adicionais diretamente no modelo. Ferramentas como o JVSG IP Video System Design Tool ajudam a refinar este processo técnico. O objetivo final é alcançar uma cobertura sobreposta, onde o campo visual de uma câmera cubra a área cega de outra. Somente quando a simulação valida uma cobertura total e sem lacunas, o plano é aprovado para instalar o sistema físico. Este método economiza tempo, reduz custos por retrabalhos e garante que o sistema funcionará como projetado desde o primeiro dia. ✅