Simular um impacto e sua deformação no Houdini
Criar o efeito de um golpe e a mossa que ele deixa no Houdini requer combinar dinâmicas de corpos rígidos com técnicas de deformar a geometria. O processo começa com uma malha de alta definição para o objeto que receberá o dano. 🛠️
Preparar o sistema de colisão
O núcleo do método é um solucionador RBD. Aqui, o objeto que golpeia é definido como um corpo rígido ativo, enquanto o alvo pode ser passivo ou capaz de fraturar. É vital ajustar parâmetros como a massa e o atrito. Para que o contato deixe uma marca permanente, implementa-se uma rede de restrições (Constraint Network) usando uniões do tipo Glue que se rompem ao superar uma força definida, permitindo que a geometria ceda exatamente na área do choque.
Passos chave para a simulação:- Usar um RBD Solver para gerenciar o movimento e a interação física entre os objetos.
- Configurar as propriedades dos corpos para um comportamento realista durante o impacto.
- Aplicar um Constraint Network com limiares de ruptura para controlar onde e como o dano ocorre.
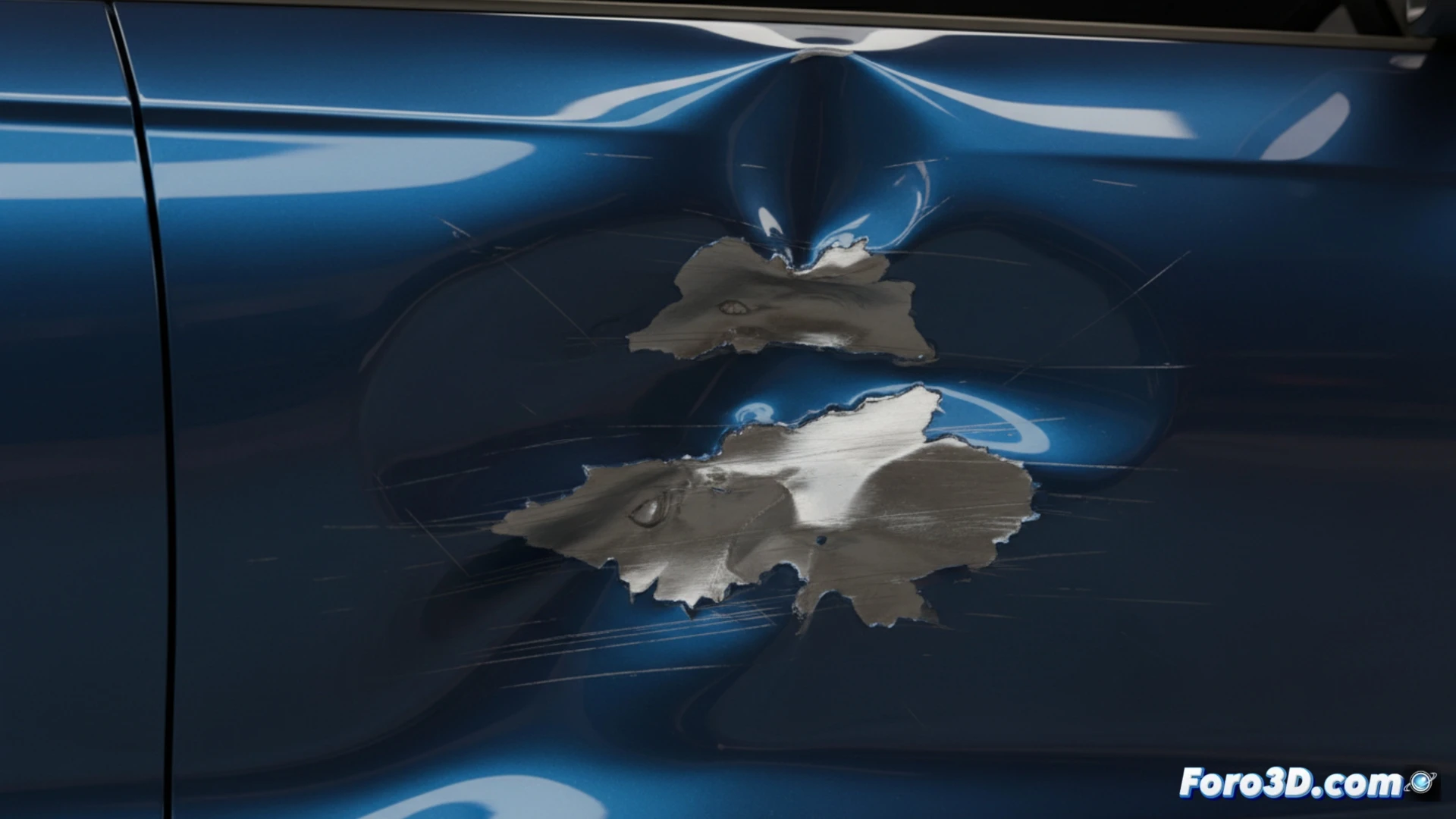
O verdadeiro desafio não é simular o choque, mas justificar depois ao cliente por que o render final demorou três dias e a mossa parece um simples arranhão.
Criar a geometria da mossa
Uma vez que ocorre o impacto, trabalha-se na malha do objeto danificado para formar a depressão. Um fluxo eficaz implica converter a geometria em um volume usando VDB from Polygons. Em seguida, com um nó VDB Reshape SDF e uma máscara que isola a zona do golpe, empurra-se a superfície para o interior. Outra via é empregar um Attribute Wrangle para manipular diretamente a posição dos pontos de acordo com sua distância ao epicentro do impacto, adicionando ruído para dar um detalhe irregular e orgânico à mossa.
Métodos para gerar a deformação:- Converter a malha em um campo de distância (SDF) com VDB para deformar o volume de maneira não destrutiva.
- Usar VDB Reshape com uma máscara espacial para localizar e esculpir a mossa.
- Programar em um Attribute Wrangle o deslocamento dos pontos, enriquecendo o resultado com padrões de ruído.
Integrar e otimizar o resultado
O sucesso final reside em integrar bem os dois passos: a simulação dinâmica que dita a força e a localização, e a operação de deformação que executa a mudança morfológica. É crucial testar com geometrias proxy para iterar rapidamente antes de passar para a malha de alta resolução, gerenciando assim o custo computacional. A meta é alcançar uma mossa convincente que justifique o tempo de simulação e render. 💻