지난달, V2X 인프라 LiDAR 센서가 장착된 스마트 교차로에서 두 대의 자율주행 차량 간 사고가 발생했습니다. 당국은 제어 시스템의 명백한 오작동에 당황하여 사건을 규명하기 위해 3D 포렌식 파이프라인에 의존했습니다. 주요 가설은 장착대의 열팽창으로 인한 교정 오류를 지목했으며, 이는 실시간으로 감지하기 어렵지만 이러한 환경의 안전에 중요한 결함입니다.
기술 워크플로우: 포인트 클라우드에서 UE5 시뮬레이션까지 🛠️
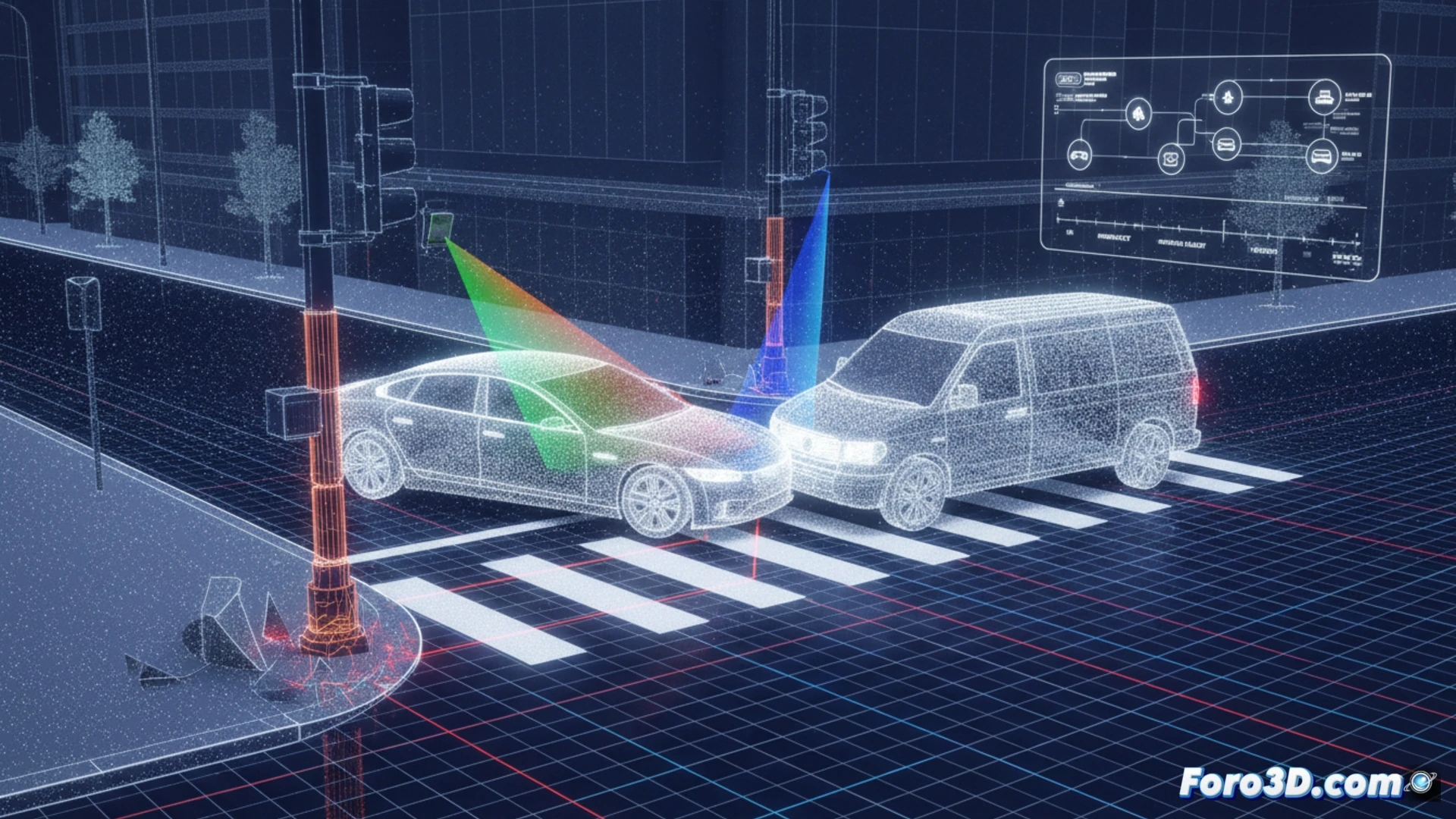
프로세스는 충격 직전 몇 초 동안 교차로 LiDAR가 기록한 원시 포인트 클라우드를 추출하는 것으로 시작되었습니다. 첫 번째 중요한 단계는 이 데이터를 CloudCompare로 가져와 정적 포인트 클라우드(기둥, 연석)를 토목 모델 CAD에 대해 미세 정렬(ICP 등록)을 수행하는 것이었습니다. 이 비교를 통해 Z축에서 4.2cm의 점진적인 포인트 클라우드 변위가 발견되었으며, 이는 주변 온도 최고점과 일치했습니다. 교정 오류를 확인한 후, 충격 운동학 계산을 위해 수정된 차량 궤적을 MATLAB으로 내보냈습니다. 마지막으로, 정리된 데이터와 차량 메쉬를 Unreal Engine 5에 통합하여 HDR 조명과 사실적인 물리 엔진으로 장면을 재현, 정확한 충돌 지점과 실패한 회피 기동을 시각화했습니다.
LiDAR 인프라 검증을 위한 교훈 📐
이 사례는 V2X 센서에 동적 교정 절차를 구현해야 할 필요성을 강조합니다. 예측 가능한 물리적 현상인 장착대의 팽창은 탑재 시스템이 감지하지 못하는 상태에서 자율주행 차량의 인식을 왜곡할 수 있습니다. 기하학적 분석을 위한 CloudCompare와 시각적 시뮬레이션을 위한 Unreal Engine 5와 같은 도구의 조합은 커넥티드 모빌리티 사고 조사에서 사실상의 표준으로 자리 잡고 있습니다. 단순히 사고를 재구성하는 것이 아니라, 물리적 환경과 디지털 인프라가 어떻게 상호 작용하여 실패하거나 생명을 구하는지 이해하는 것입니다.
설명된 것과 같은 사고가 발생하기 전에 정적 객체의 반사율 패턴 분석을 통해 V2X 교차로에서 LiDAR 교정 오류를 감지할 수 있습니까?
(추신: 장면 분석에서 모든 스케일 증인은 작지만 이름 없는 영웅입니다.)