Aiper Scuba S1 Pro는 호스와 외부 전기 연결에 대한 의존성을 없애며 가정용 서비스 로봇 공학의 도약을 나타냅니다. 이 무선 수영장 청소 로봇은 WavePath 2.0이라는 독점 내비게이션 시스템을 통합하여 수영장 바닥의 전체적인 청소를 실행할 수 있습니다. 에너지 자율성과 벽을 오르고 수위선을 공격하는 능력은 3D 자동화가 복잡한 유지 관리 문제를 해결하는 방법을 분석하기 위한 이상적인 사례 연구로 만듭니다.
센서 아키텍처 및 WavePath 2.0 알고리즘 🤖
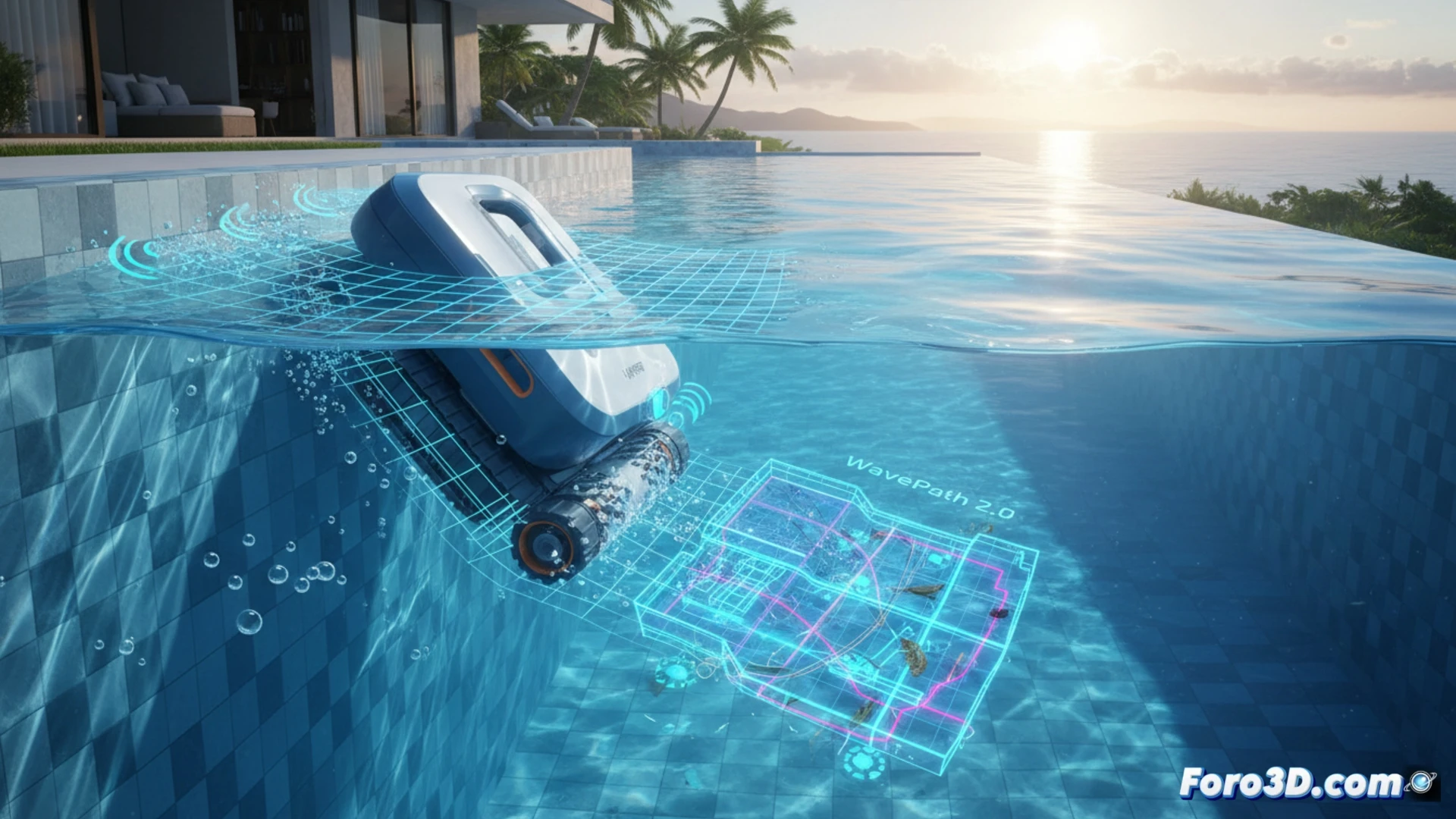
Scuba S1 Pro 성능의 핵심은 체적 매핑 알고리즘에 있습니다. 접촉 센서나 단순한 자이로스코프에 의존하는 로봇과 달리 WavePath 2.0 시스템은 3축 가속도계와 차압 센서의 조합을 사용하여 환경의 3차원 지도를 구축합니다. 로봇은 무작위로 튕겨 다니는 데 그치지 않습니다. 바닥, 벽 및 수위선을 덮기 위해 나선형 및 평행 궤적을 계산합니다. 기울기 센서를 통해 각도 변화를 감지하면 이중 임펠러 펌프에서 생성된 흡입력을 사용하여 표면에 부착하면서 수직 벽을 오르기 위해 구동 모터를 활성화합니다. 수위선에 도달하면 속도를 줄이고 측면 브러시를 확장하여 축적된 잔해물을 긁어내어 불필요한 중복 없이 둘레의 100%가 덮이도록 합니다.
3D 자동화 vs. 기존 시스템 🏊
유선 수영장 로봇 또는 무작위 모델과 비교할 때 S1 Pro는 우수한 에너지 및 시간 효율성을 보여줍니다. 기존 시스템은 종종 이미 청소된 영역을 청소하는 데 시간을 낭비하거나 계단과 같은 장애물에 갇힙니다. Scuba S1 Pro의 3D 자동화는 전체 수량을 매핑하여 충전 스테이션으로의 복귀 경로를 최적화하고 오염이 가장 많이 축적된 영역을 우선시합니다. 이는 예상 청소 주기 시간을 30% 단축할 뿐만 아니라 지속적인 충돌을 방지하여 기계적 마모를 최소화합니다. 이 로봇은 가정용 로봇 공학의 진정한 혁신이 흡입력에만 있는 것이 아니라 수영장과 같은 복잡한 3차원 환경에서 효율적으로 이동하는 지능에 있음을 보여줍니다.
Aiper Scuba S1 Pro와 같은 수영장 로봇에서 자율 주행 알고리즘을 구현하는 것이 구조화되지 않은 수중 환경에서 에너지 효율성과 완전한 적용 범위의 주요 과제를 어떻게 해결합니까?
(추신: 로봇을 시뮬레이션하는 것은 재미있습니다. 당신의 명령을 따르지 않기로 결정할 때까지는요.)