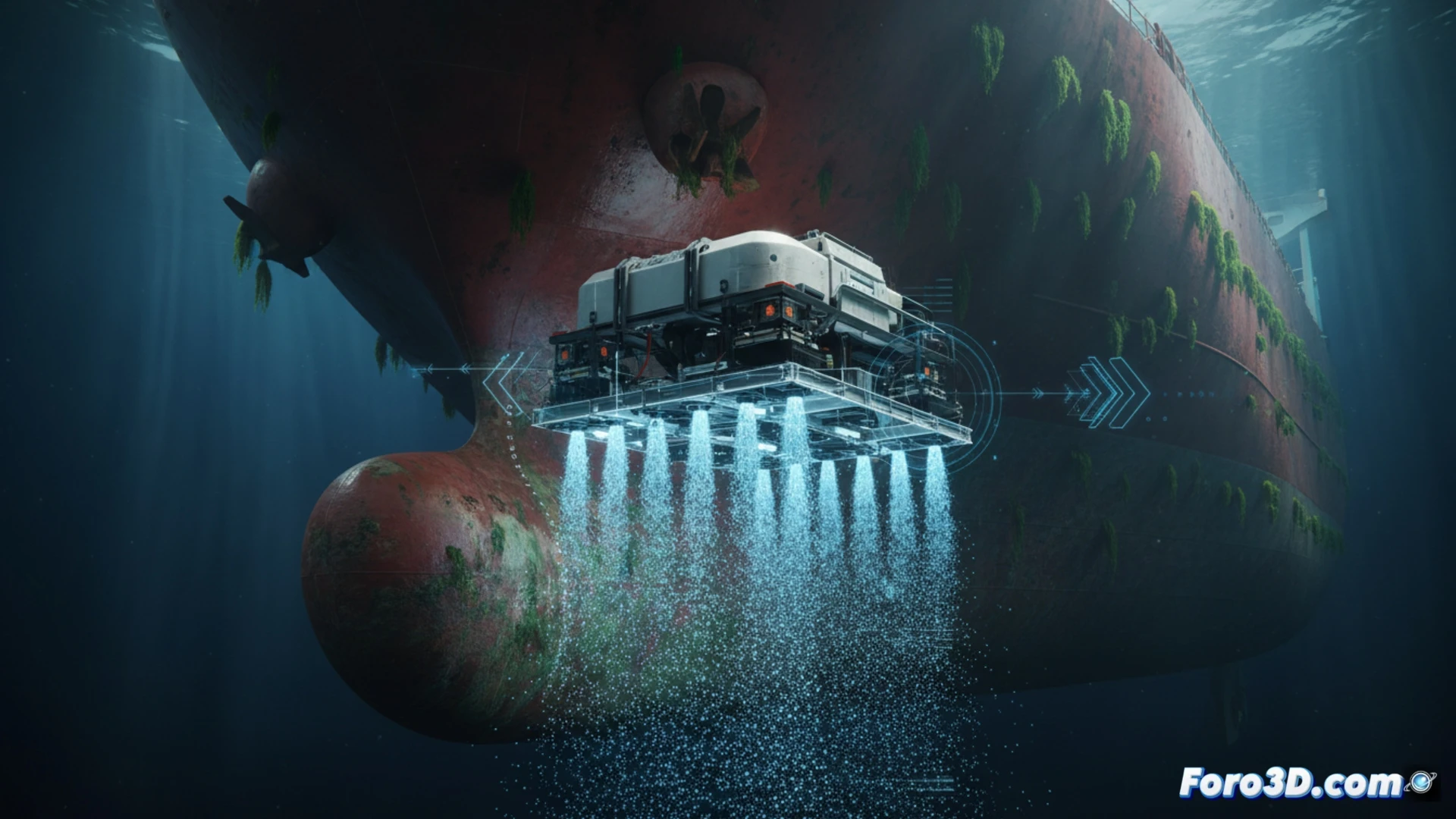
HullWiper는 선박 선체를 손상시키지 않고 고압 워터 제트를 사용하여 선체를 청소하도록 설계된 원격 조종 수중 차량(ROV)입니다. 3D 모델링에는 선체 형상, 제트 노즐 및 유체 역학을 캡처해야 합니다. 이 기사에서는 가상 환경에서 작동을 시뮬레이션하여 연료 효율성과 선박 코팅의 수명을 최적화하기 위한 기술적 워크플로를 분석합니다.
기술 워크플로: 스캐닝, 메싱 및 경로 시뮬레이션 🤖
프로세스는 선박 선체의 레이저 스캐닝으로 시작하여 포인트 클라우드를 생성합니다. 이는 CAD 소프트웨어(예: Blender 또는 Rhino)에서 고해상도 폴리곤 메시로 변환됩니다. 그런 다음 서보 모터와 조정 가능한 노즐로 설계된 ROV HullWiper 모델이 통합됩니다. 워터 제트를 시뮬레이션하기 위해 SPH(Smoothed Particle Hydrodynamics) 방법을 기반으로 하는 동적 입자 또는 유체가 사용됩니다. 다음 단계는 페인트를 침식할 수 있는 각도를 피하면서 스위핑 알고리즘을 통해 청소 경로를 정의하는 것입니다. 최종 시뮬레이션은 압력과 노출 시간을 검증하여 코팅의 접착 한계를 초과하지 않도록 매개변수를 조정합니다.
가상 최적화: 효율성 및 페인트 손상 방지 🚢
3D 시뮬레이션을 통해 실제 위험 없이 수백 가지 구성을 테스트할 수 있습니다. 선체의 압력 분포를 시각화하면 제트가 페인트를 들어올릴 수 있는 중요한 영역이 식별됩니다. 모델에서 노즐의 거리와 각도를 조정하면 작동 시간이 20% 단축된 균일한 청소가 가능합니다. 이 접근 방식은 선박의 연료 소비를 최대 10%까지 줄이고 코팅 수명을 연장하여 수중 로봇 공학과 3D 모델링이 현대 해양 자동화에서 없어서는 안 될 동맹임을 입증합니다.
선박 선체를 손상시키지 않으면서 청소 효율성을 최적화하기 위해 ROV HullWiper의 워터 제트 3D 모델링에서 고려해야 할 CFD 시뮬레이션 매개변수는 무엇입니까?
(추신: 로봇을 시뮬레이션하는 것은 재미있지만, 명령을 따르지 않기로 결정할 때까지는 그렇습니다.)