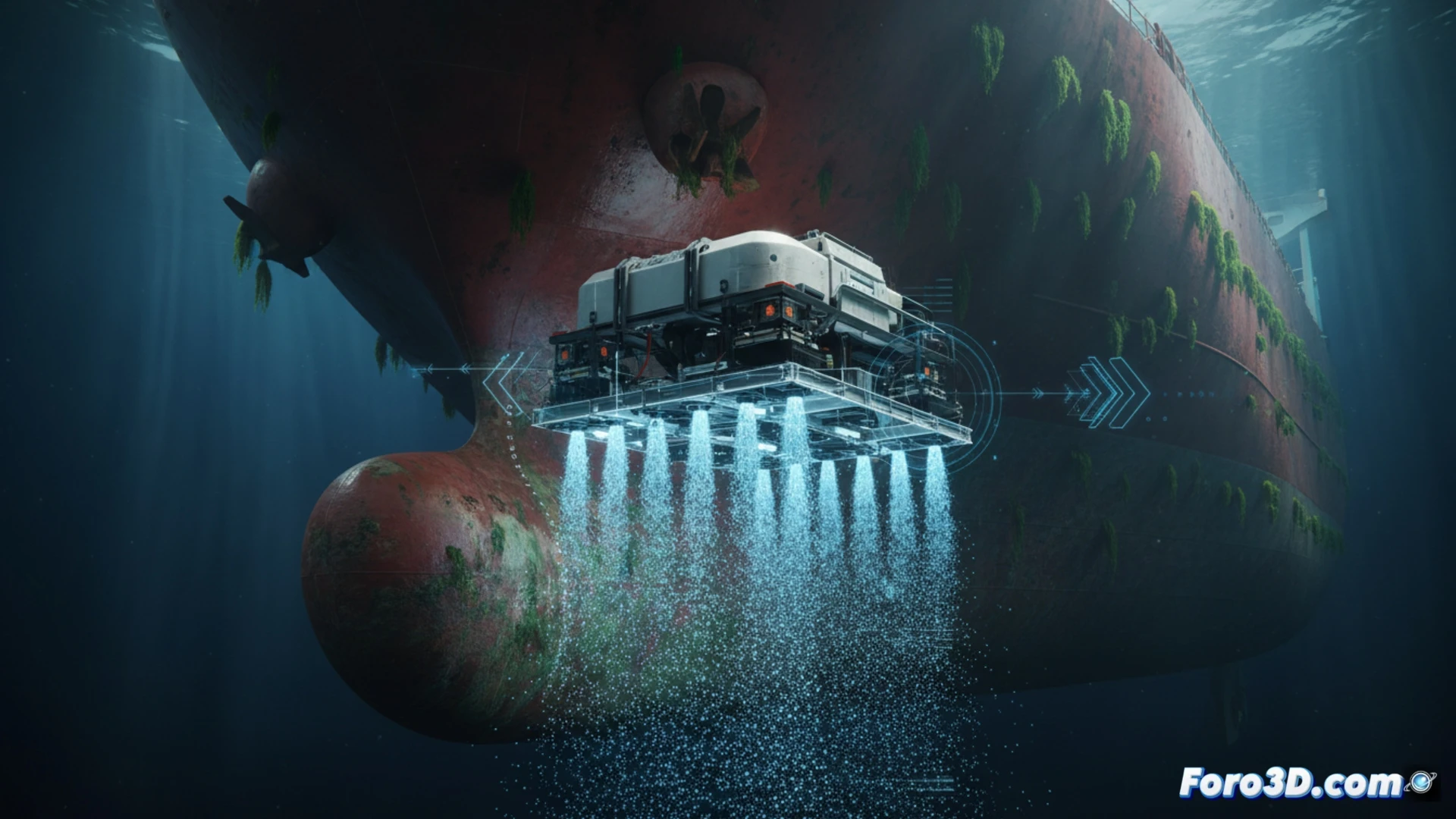
El HullWiper es un vehículo submarino operado remotamente (ROV) diseñado para limpiar cascos de barcos mediante chorros de agua a alta presión, sin dañar la pintura anticorrosiva. Su modelado 3D requiere capturar la geometría del casco, las boquillas de los chorros y la dinámica del fluido. Este artículo desglosa el flujo de trabajo técnico para simular su funcionamiento en entornos virtuales, optimizando la eficiencia del combustible y la vida útil del recubrimiento naval.
Flujo de trabajo técnico: Escaneo, mallado y simulación de trayectorias 🤖
El proceso comienza con el escaneo láser del casco del barco para generar una nube de puntos. Esta se convierte en una malla poligonal de alta resolución en software CAD (como Blender o Rhino). Luego se integra el modelo del ROV HullWiper, diseñado con servomotores y boquillas orientables. Para simular los chorros de agua, se emplean partículas dinámicas o fluidos basados en el método SPH (Smoothed Particle Hydrodynamics). El siguiente paso es definir trayectorias de limpieza mediante algoritmos de barrido, evitando ángulos que puedan erosionar la pintura. La simulación final valida la presión y el tiempo de exposición, ajustando parámetros para no exceder los límites de adherencia del recubrimiento.
Optimización virtual: Eficiencia y prevención de daños en la pintura 🚢
La simulación 3D permite probar cientos de configuraciones sin riesgos reales. Al visualizar la distribución de presión sobre el casco, se identifican zonas críticas donde el chorro podría levantar la pintura. Ajustando la distancia y el ángulo de las boquillas en el modelo, se logra una limpieza uniforme con un 20% menos de tiempo de operación. Este enfoque reduce el consumo de combustible del barco hasta un 10% y prolonga la vida del recubrimiento, demostrando que la robótica submarina y el modelado 3D son aliados indispensables en la automatización naval moderna.
Que parámetros de simulación CFD se deben considerar en el modelado 3D de los chorros de agua del ROV HullWiper para optimizar la eficiencia de limpieza sin dañar el casco del barco?
(PD: Simular robots es divertido, hasta que deciden no seguir tus órdenes.)