스마트 교차로에서 V2X 신호등이 통행 가능을 표시했지만 자율주행 차량이 제때 반응하지 못하는 사고가 발생했습니다. 오류를 규명하기 위해 교차로의 정확한 디지털 트윈이 구축되었습니다. 이 모델은 거리 LIDAR 데이터를 사용하여 실제 환경을 복제했으며, 엔지니어들이 중요한 변수를 분리할 수 있게 했습니다: 센서 감지와 차량 응답 사이의 지연 시간. 목표는 녹색 신호를 치명적인 함정으로 만든 시간적 차이를 찾는 것이었습니다.
LIDAR 포인트 클라우드 가져오기 및 Unity에서의 지연 시간 시뮬레이션 🚦
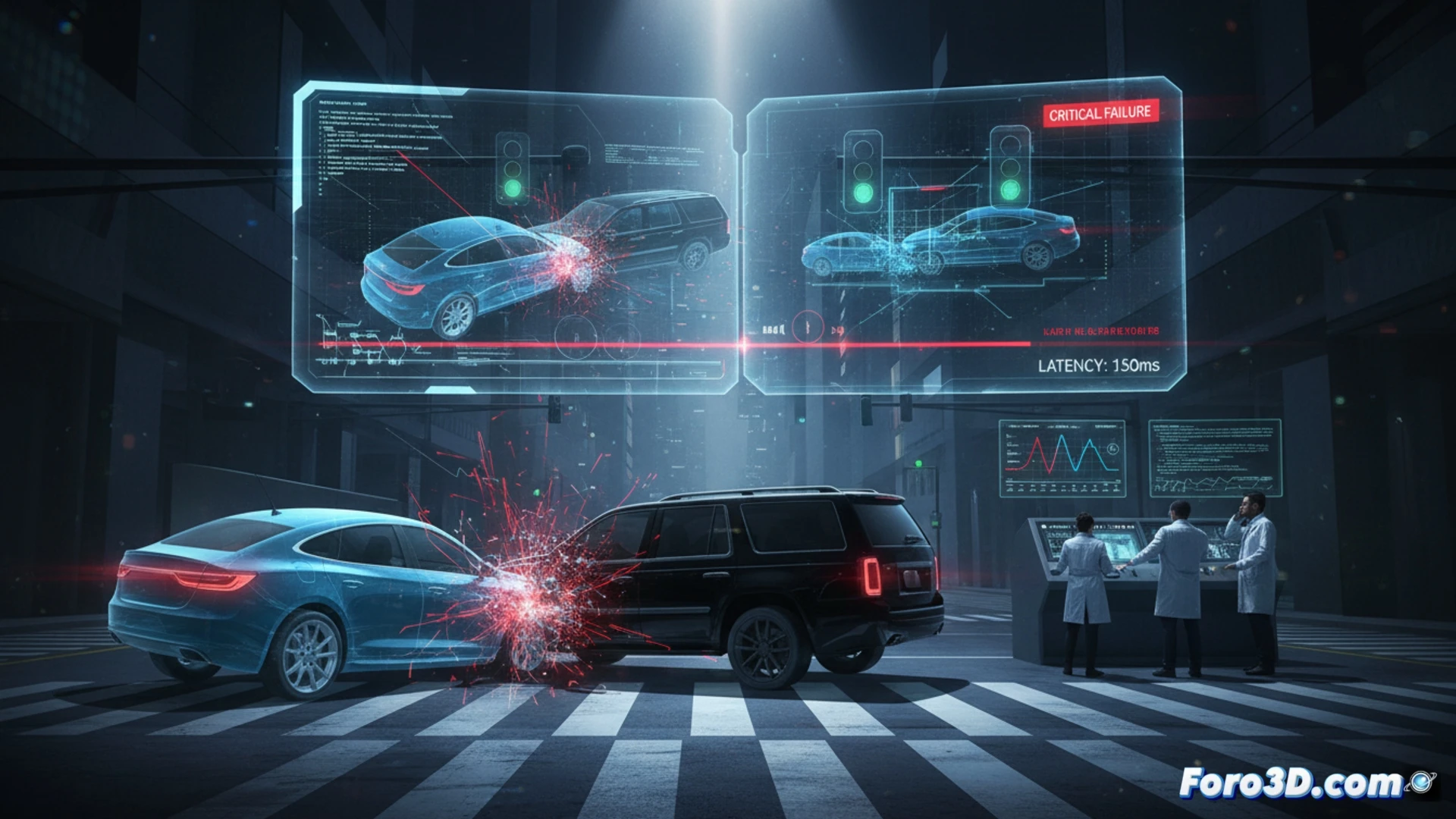
프로세스는 거리에 고정된 LIDAR 센서를 통해 도로 형상을 캡처하는 것으로 시작되었습니다. 원시 데이터는 CloudCompare에서 처리되어 노이즈를 제거하고 포인트 클라우드를 교차로의 CAD 모델과 정렬했습니다. 이 최적화된 메시는 Unity로 가져와 디지털 트윈이 생성되었습니다. 사고를 재현하기 위해 V2X 네트워크 지연 시간을 시뮬레이션하는 스크립트가 프로그래밍되었습니다. Unreal Engine 5에서는 정확한 시퀀스가 시각화되었습니다: LIDAR 센서가 보행자를 감지하고 신호를 보냈지만, 자율주행 차량은 120밀리초의 지연으로 제동 명령을 수신하여 충돌을 일으키기에 충분했습니다. MATLAB은 디지털 트윈의 시간 신호를 분석하여 LIDAR 타임스탬프와 차량 ECU의 타임스탬프를 비교, 치명적인 시간 차이를 확인했습니다.
더 안전한 스마트 인프라를 위한 교훈 🛠️
디지털 트윈은 오류가 센서나 차량이 아닌 V2X 동기화 프로토콜에 있음을 입증했습니다. 120ms의 지연 시간은 작지만 고속 환경에서 치명적이었습니다. 해결책은 더 빠른 하드웨어뿐만 아니라 디지털 트윈 시뮬레이션을 통해 검증된 신호등 소프트웨어의 임시 안전 버퍼 구현입니다. 이 사례는 스마트 시티의 신뢰성이 가상 트윈과 물리적 시스템 간의 완벽한 동기화에 달려 있음을 강조합니다.
엔지니어로서, V2X 신호등과 디지털 트윈 클라우드 사이의 특정 지연 시간(밀리초)이 자율주행 차량 반응의 치명적인 시간 차이를 초래했습니까?
(추신: 제 디지털 트윈은 지금 회의 중이고, 저는 여기서 모델링을 하고 있습니다. 그래서 기술적으로 저는 두 곳에 동시에 있는 셈입니다.)