로봇 수술 중 미세 수술용 바늘의 파손은 중요한 기술적 딜레마를 제기합니다: 재료의 피로 파손인가, 아니면 로봇의 과도한 압력 때문인가? 회수된 파편은 3D 전자 현미경(ZEISS ZEN)과 미세 유한 요소 시뮬레이션(Abaqus)을 통해 법의학적 분석을 받습니다. 이 글은 구조적 붕괴의 근본 원인을 파악하기 위한 작업 흐름을 분석합니다.
법의학 작업 흐름: 3D 미세 현미경에서 피로 시뮬레이션까지 🔬
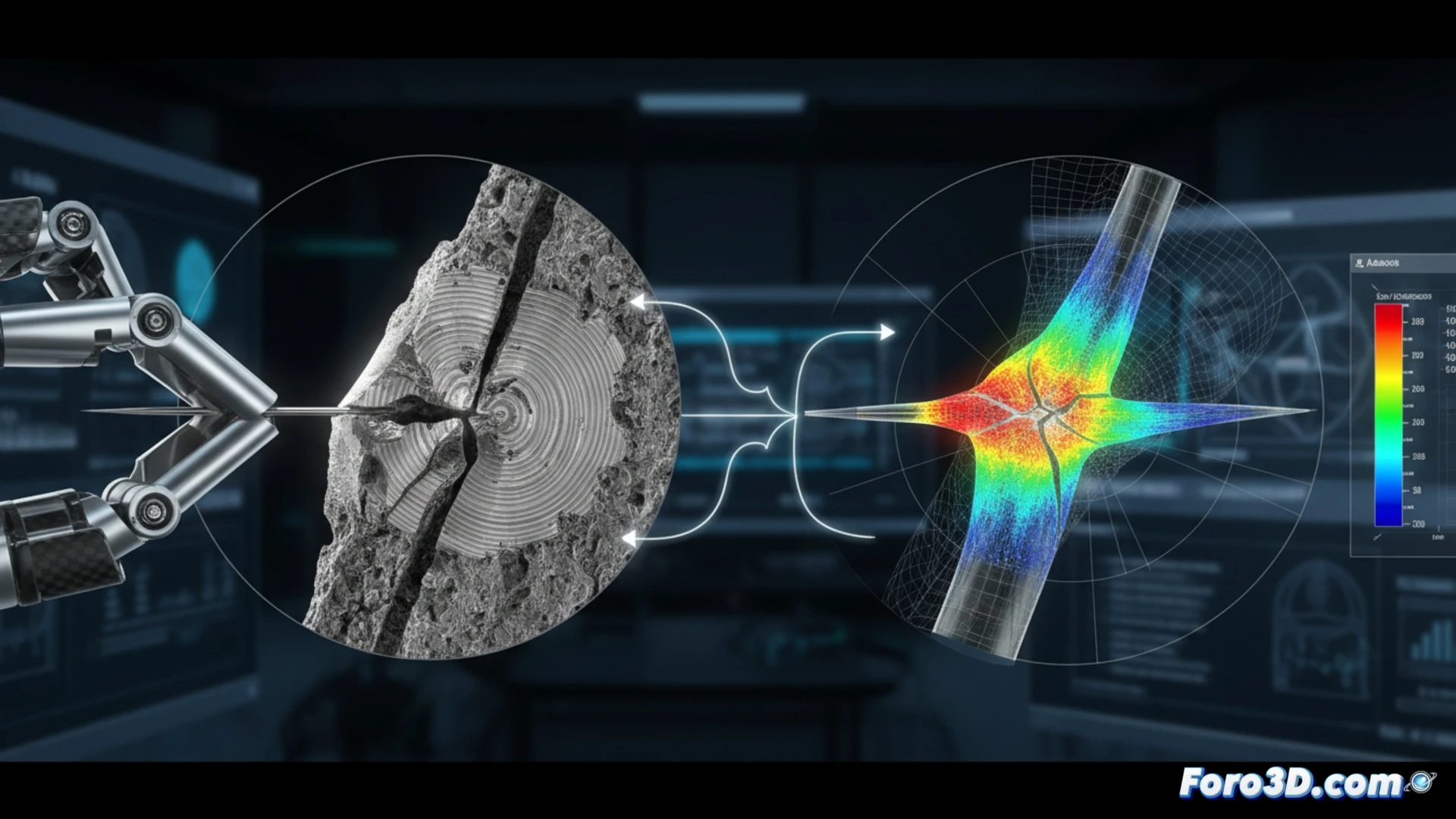
프로세스는 ZEISS ZEN에서 파편의 표면 지형을 캡처하여 균열 전파 흔적과 피로 줄무늬를 드러내는 고해상도 3D 모델을 생성하는 것으로 시작됩니다. 이 모델은 Materialise Mimics로 내보내져 실제 형상을 분할하고 인공물을 보정합니다. 그런 다음 Abaqus로 가져와 로봇 봉합의 일반적인 주기적 하중을 시뮬레이션하는 미세 FEA를 수행합니다. 분석은 두 가지 시나리오를 비교합니다: 반복적인 주기에 의한 누적 피로 대 316L 스테인리스강의 항복 한계를 초과하는 점 과부하. 바늘 끝의 Von Mises 응력 분포는 파손이 뼈 조직과의 접촉 영역과 일치하는지 여부를 결정합니다.
햅틱 피드백의 딜레마: 제어된 압력인가, 소프트웨어 오류인가? 🤖
시뮬레이션은 점 과부하가 깨끗한 가장자리를 가진 취성 파괴 패턴을 생성하는 반면, 피로는 점진적인 줄무늬와 국부적인 소성 변형을 생성한다는 것을 보여줍니다. Abaqus 모델이 지속적인 압력 조건에서만 최대 응력이 재료 임계값을 초과했음을 확인하면, 원인은 햅틱 피드백 소프트웨어의 오류를 가리킵니다. 이 분석은 재료를 무죄로 만들 뿐만 아니라 향후 사고를 방지하기 위해 로봇의 저항 알고리즘을 재보정하도록 강제합니다.
로봇 수술 중 파손된 수술용 바늘의 법의학 FEA 시뮬레이션에서, 감지되지 않은 미세 진동으로 인한 주기적 피로 파손과 로봇 액추에이터 강성으로 인한 점 과부하 파손을 어떻게 구별할 수 있습니까?
(참고: 재료 피로는 10시간 시뮬레이션 후의 당신과 같습니다.)