최근 원격 수술 중 수술 로봇의 고장이 자동화 업계에 경보를 울렸습니다. 메스가 치명적인 불규칙 움직임을 실행한 이 사고는 로봇 팔에서 발생했습니다. 광학 계측을 통한 포렌식 분석 결과, 원인은 소프트웨어 오류가 아니라 제어 신호 지연으로 인한 서보모터와 기어의 비대칭 미세 마모인 것으로 밝혀졌습니다.
정밀 계측: 스캔 및 피로 분석 🔬
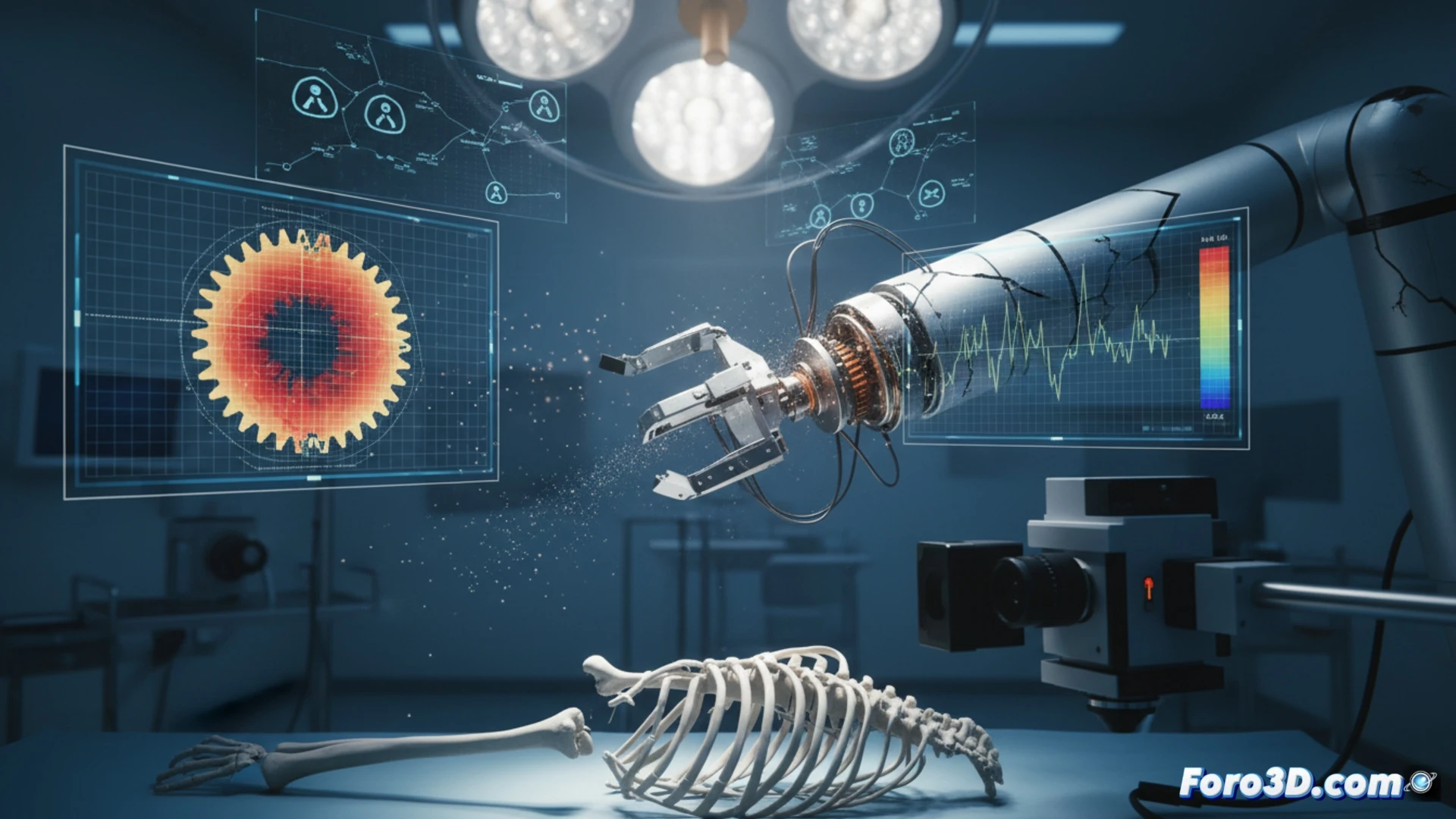
근본 원인을 파악하기 위해 GOM ATOS Q 스캐너를 사용하여 로봇의 서보와 기어 형상을 캡처했습니다. 계측 소프트웨어는 접촉 표면에서 육안으로는 볼 수 없는 불과 수 마이크론의 편차, 즉 비대칭 마모를 감지했습니다. 이 마모 패턴은 수술 중 MATLAB에 기록된 지속적인 미세 진동과 상관관계가 있었습니다. 외과의사가 인지하지 못할 정도의 제어 신호 지연으로 인해 서보가 진동하고 과도하게 보정되어 합금 기어 이에 주기적 피로가 발생했습니다. SolidWorks 모델은 누적된 응력이 재료의 피로 한계를 초과하여 밀리미터 단위의 정밀도가 상실되었음을 확인했습니다.
디지털 트윈 및 예측 제어를 위한 교훈 ⚙️
이 사례는 수술 로봇 공학이 소프트웨어의 정밀도뿐만 아니라 마이크로미터 단위의 기계적 무결성에 달려 있음을 보여줍니다. 제안된 해결책은 지연 데이터를 기반으로 실시간 마모를 시뮬레이션하는 Blender 및 SolidWorks의 디지털 트윈을 구현하는 것입니다. MATLAB의 진동 스펙트럼 분석을 기반으로 한 예측 유지보수 시스템은 이러한 진동이 심각한 마모를 유발하기 전에 감지할 수 있습니다. 이번 고장은 하드웨어의 문제가 아니라 네트워크로 인한 기계적 피로를 무시한 제어 설계의 문제였습니다.
수술 로봇 업계는 장거리 원격 수술에서 신호 지연으로 인한 액추에이터의 미세 마모 위험을 어떻게 완화할 수 있을까요?
(참고: 로봇을 시뮬레이션하는 것은 재미있지만, 명령을 따르지 않기로 결정할 때까지 그렇습니다.)