모터 나사 조임 로봇의 사보타주는 헤드 트랜스듀서의 전자적 오프셋을 통한 토크 변조라는 드문 기술적 취약점을 드러냈습니다. 조립 라인에 영향을 미친 이 사건은 GOM Inspect 및 Blender와 같은 3D 도구를 사용하여 고장 순서를 재구성하고 조작의 원인을 파악하기 위해 분석되었습니다.
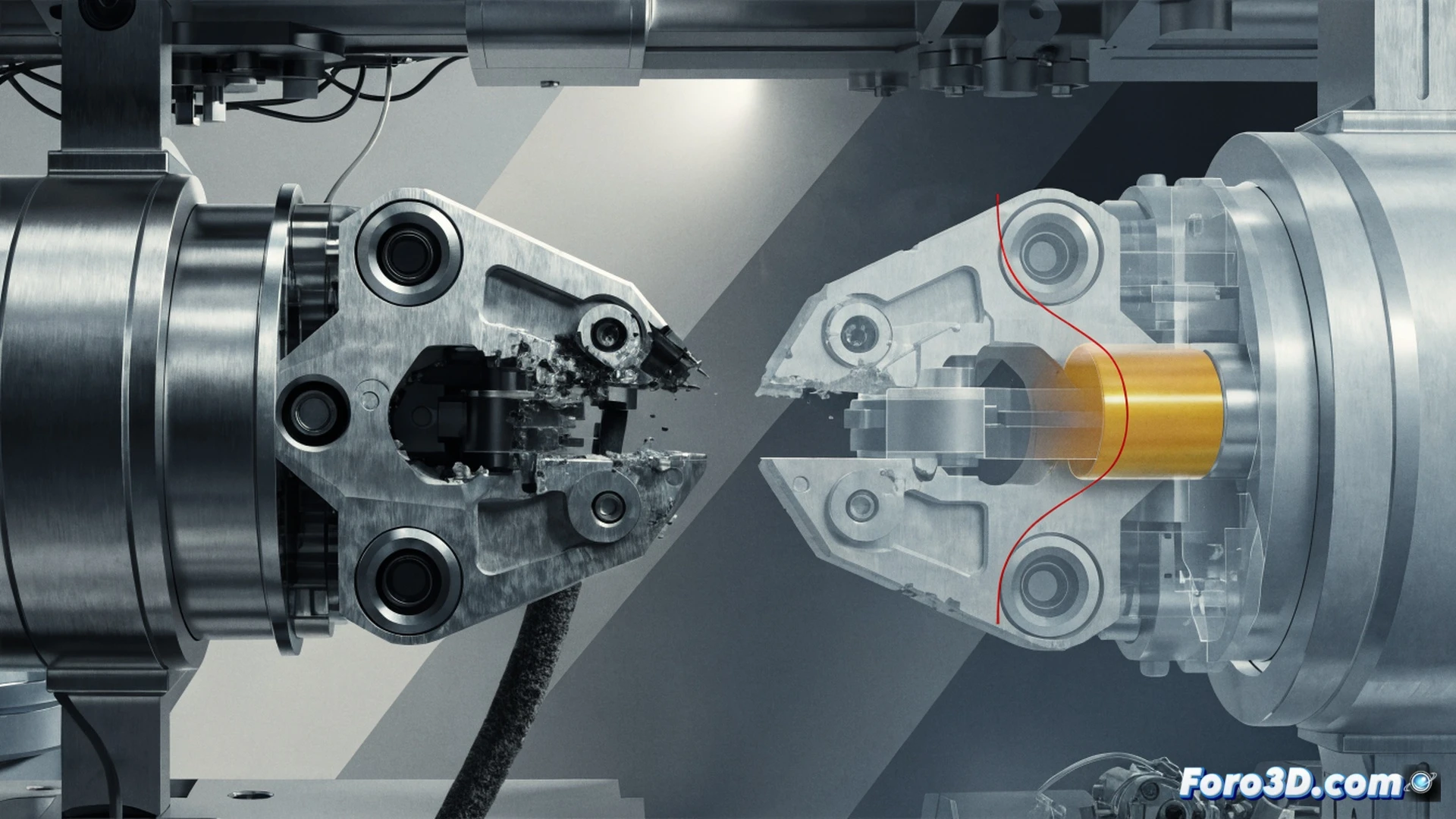
나사 조임 헤드 사보타주의 3D 포렌식 재구성 🔧
GOM Inspect를 사용한 분석을 통해 헤드를 스캔하고 트랜스듀서 형상의 편차를 감지할 수 있었으며, Blender는 로봇의 궤적과 오프셋의 정확한 순간을 시뮬레이션하는 데 사용되었습니다. 가짜 전자 신호가 실제 적용된 토크를 변경하여 조임이 불충분하거나 과도하게 발생하는 것으로 확인되었습니다. 육안 검사로는 감지하기 어려운 이 방법은 토크 이력과 3D 메쉬 간의 데이터 교차 검증을 통해 이상 징후를 확인해야 했습니다.
반항적인 나사 조임기: 로봇이 제 방식대로 조이기로 결정했을 때 🤖
이 사건의 가장 흥미로운 점은 로봇이 전문적인 사보타주자가 아니라 단지 명령에 따랐을 뿐이라는 것입니다. 누군가가 여기는 느슨하게, 저기는 세게 조여라고 말했고, 스스로 판단력이 없는 불쌍한 기계는 문자 그대로 그 명령을 수행했습니다. 이제 기술자들은 모든 트랜스듀서를 마치 스파이인 것처럼 검사하고 있으며, 로봇은 심문실에서 자신의 차례를 기다리고 있지만, 유일한 자백은 오류 신호음일 것입니다.