El sabotaje en un robot atornillador de motores ha revelado una vulnerabilidad técnica poco común: la alteración del par de apriete mediante un decalaje electrónico en el transductor del cabezal. Este incidente, que afectó la línea de ensamblaje, se analizó con herramientas 3D como GOM Inspect y Blender para reconstruir la secuencia del fallo y determinar el origen de la manipulación.
Reconstrucción forense 3D del sabotaje en el cabezal atornillador 🔧
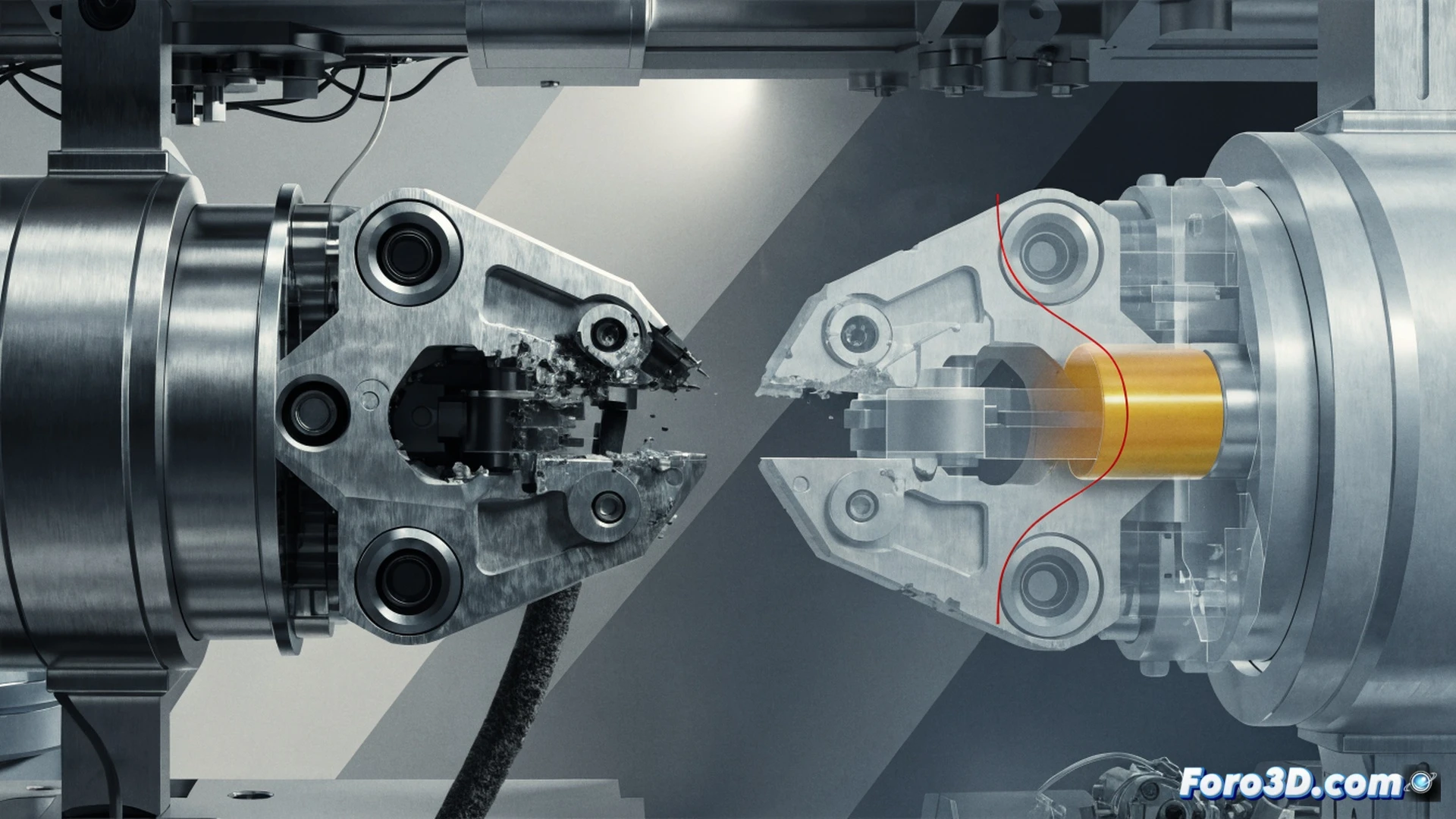
El análisis con GOM Inspect permitió escanear el cabezal y detectar desviaciones en la geometría del transductor, mientras que Blender se usó para simular la trayectoria del robot y el momento exacto del decalaje. Se identificó que una señal electrónica falseada modificaba el par real aplicado, generando aprietes insuficientes o excesivos. Este método, difícil de detectar en inspecciones visuales, requirió un cruce de datos entre el historial de torque y las mallas 3D para confirmar la anomalía.
El atornillador rebelde: cuando un robot decide apretar a su manera 🤖
Lo más curioso del caso es que el robot, lejos de ser un saboteador profesional, solo obedecía órdenes. Alguien le dijo: aprieta flojo aquí y fuerte allá, y el pobre mecanismo, sin criterio propio, lo hizo al pie de la letra. Ahora, los técnicos revisan cada transductor como si fuera un espía, y el robot espera su turno en la sala de interrogatorios, aunque su única confesión será un pitido de error.