사전 3D 모델이 보안의 사각지대를 제거합니다
효과적인 감시 시스템을 계획하는 것은 더 이상 추측에 의존하지 않습니다. 전문가들은 이제 3D 스캔 기술을 사용하여 실제 공간의 디지털 트윈을 구축합니다. 이 모델은 물리적 설치 전에 각 구성 요소를 설계, 테스트 및 세밀하게 조정하기 위한 최종 테스트베드가 되며, 인간의 오류를 제거합니다. 🎯
밀리미터 단위의 정밀도로 디지털 기반 생성
첫 번째 단계는 현실을 포착하는 것입니다. Leica RTC360과 같은 레이저 스캐너는 박물관과 같은 환경의 전체 지오메트리를 기록합니다. 이 장치는 매우 밀도 있고 정밀한 포인트 클라우드를 생성합니다. 기술자들은 Autodesk ReCap과 같은 전문 소프트웨어에서 이러한 데이터를 처리하여 사용 준비가 된 견고한 3D 모델을 생성합니다. 이 가상 복제본은 모든 기둥, 진열장 및 복도를 정확하게 포함합니다.
초기 스캔의 주요 장점:- 절대적인 정밀도: 치수와 장애물이 오류 없이 포착됩니다.
- 완전한 문서화: 사이트 상태의 영구적인 3D 기록을 얻습니다.
- 시뮬레이션 기반: 모델은 전체 시스템을 테스트할 환경입니다.
보안의 진짜 도둑은 무작위 카메라 배치가 작동한다고 가정하는 것입니다. 3D 시뮬레이션은 즉흥성을 논쟁의 여지없이 만듭니다.
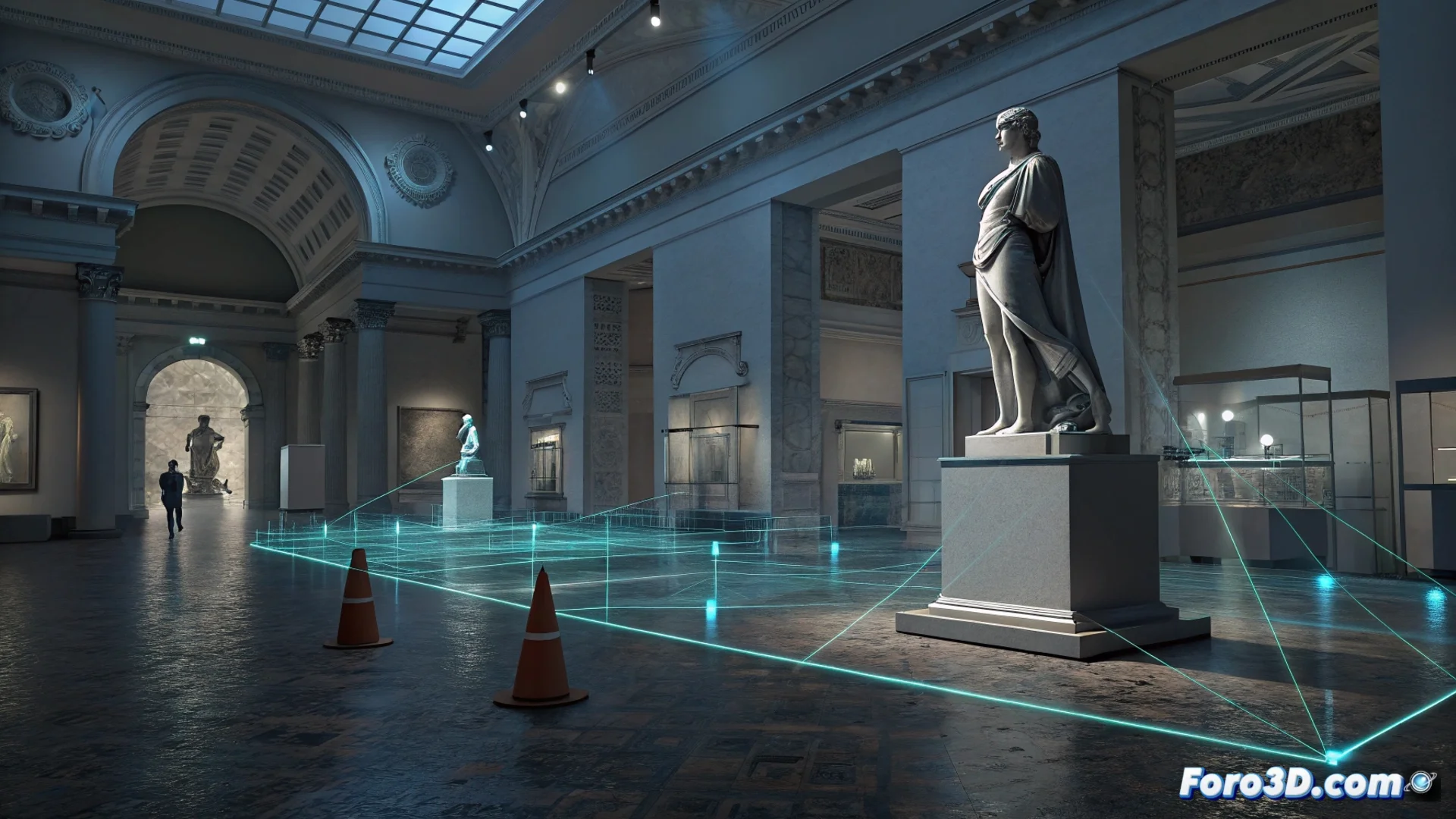
3D 엔진에서 커버리지 시뮬레이션 및 분석
Unreal Engine 또는 Unity와 같은 엔진에 3D 모델을 로드하면 활성 설계 단계가 시작됩니다. 계획자들은 제안된 위치에 가상 감시 카메라를 배치합니다. 실제 기술적 매개변수를 설정합니다: 초점 거리, 해상도, 기울기 각도 및 시야각. 소프트웨어는 각 카메라의 시각을 렌더링하며, 자동으로 커버된 영역과 중요한 것은 주변 물체가 생성하는 그림자와 장애물을 계산합니다. 이렇게 하면 사람이 감지되지 않고 이동할 수 있는 복도나 모퉁이가 드러납니다: 사각지대.
시뮬레이션되는 매개변수:- 각 카메라의 시야각(FOV) 및 효과적 범위.
- 건축적 장애물 및 가구의 효과.
- 환경 조명과 카메라 시야의 상호작용.
설계 최적화 및 설치 검증
사각지대를 식별하면 설계를 즉시 반복할 수 있습니다. 기술자들은 모델에서 직접 위치를 조정하고, 렌즈 유형을 변경하거나 추가 장치를 추가합니다. JVSG IP Video System Design Tool과 같은 도구가 이 기술적 프로세스를 세밀하게 돕습니다. 최종 목표는 한 카메라의 시야가 다른 카메라의 사각 영역을 커버하는 중복 커버리지를 달성하는 것입니다. 시뮬레이션이 완전하고 틈새 없는 커버리지를 검증한 후에만 물리적 시스템 설치 계획이 승인됩니다. 이 방법은 시간을 절약하고, 재작업 비용을 줄이며, 시스템이 첫날부터 설계대로 작동하도록 보장합니다. ✅