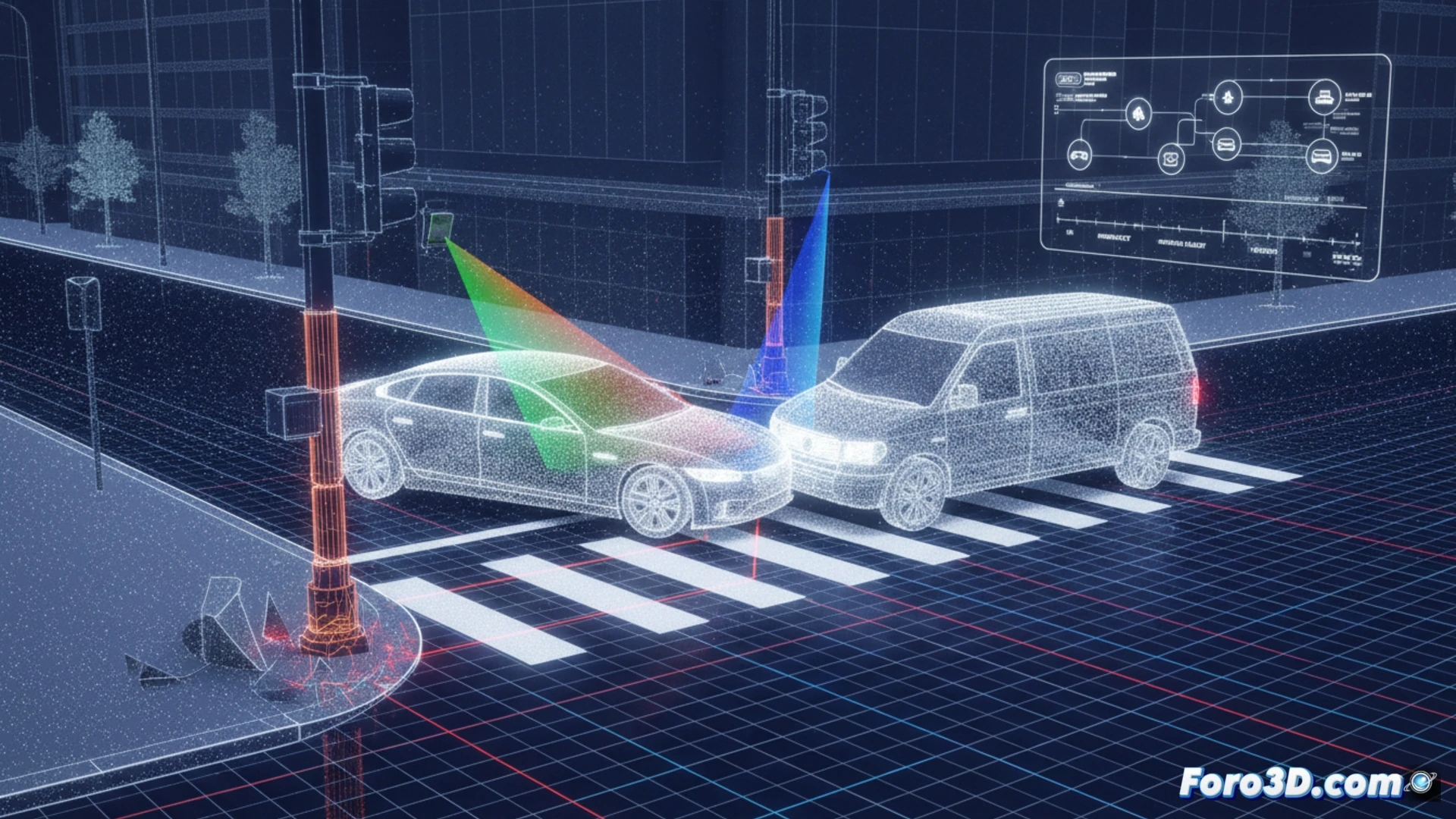
先月、V2Xインフラストラクチャ用LiDARセンサーを搭載したスマート交差点で、2台の自動運転車両間の事故が発生しました。制御システムの明らかな故障に困惑した当局は、事実を解明するために3Dフォレンジックパイプラインに頼りました。主な仮説は、マウントポールの熱膨張によって引き起こされたキャリブレーションエラーであり、これはリアルタイムで検出するのは困難ですが、これらの環境の安全性にとって重要な故障です。
技術ワークフロー:点群からUE5でのシミュレーションへ 🛠️
プロセスは、衝突の数秒前に交差点のLiDARによって記録された生の点群の抽出から始まりました。最初の重要なステップは、これらのデータをCloudCompareにインポートし、静的オブジェクト(ポール、縁石)の点群と土木CADモデルとの間で精密な位置合わせ(ICPレジストレーション)を実行することでした。この比較により、Z軸方向に4.2センチメートルの点群の進行性のずれが明らかになり、これは気温のピークと一致していました。キャリブレーションエラーを確認した後、補正された車両の軌跡をMATLABにエクスポートして衝突運動学を計算しました。最後に、クリーンなデータと車両メッシュをUnreal Engine 5に統合し、HDR照明とリアルな物理演算を使用してシーンを再現し、正確な衝突点と失敗した回避操作を視覚化しました。
LiDARインフラ検証のための教訓 📐
このケースは、V2Xセンサーに動的キャリブレーションプロシージャを実装する必要性を強調しています。ポールの膨張は予測可能な物理現象であり、車載システムが検出することなく自動運転車の認識を狂わせる可能性があります。幾何学的解析のためのCloudCompareや視覚的シミュレーションのためのUnreal Engine 5などのツールの組み合わせは、コネクテッドモビリティ事故調査における事実上の標準として定着しつつあります。これは単に事故を再現することではなく、物理的環境とデジタルインフラストラクチャがどのように相互作用して失敗したり命を救ったりするかを理解することです。
記述されたような事故が発生する前に、静的オブジェクトの反射率パターンを分析することで、V2X交差点のLiDARキャリブレーションエラーを検出することは可能ですか?
(追伸:シーン分析において、すべてのスケール証人は小さな無名のヒーローです。)