Aiper Scuba S1 Proは、ホースや外部電源接続への依存を排除し、家庭用サービスロボティクスにおける飛躍を象徴しています。このコードレスプール掃除ロボットは、WavePath 2.0と呼ばれる独自のナビゲーションシステムを統合しており、プールの浴槽全体を包括的に清掃できます。そのエネルギー自律性と、壁を登ったり水面線を攻撃する能力により、3D自動化が複雑なメンテナンス問題をどのように解決するかを分析するための理想的なケーススタディとなっています。
センサーアーキテクチャとWavePath 2.0アルゴリズム 🤖
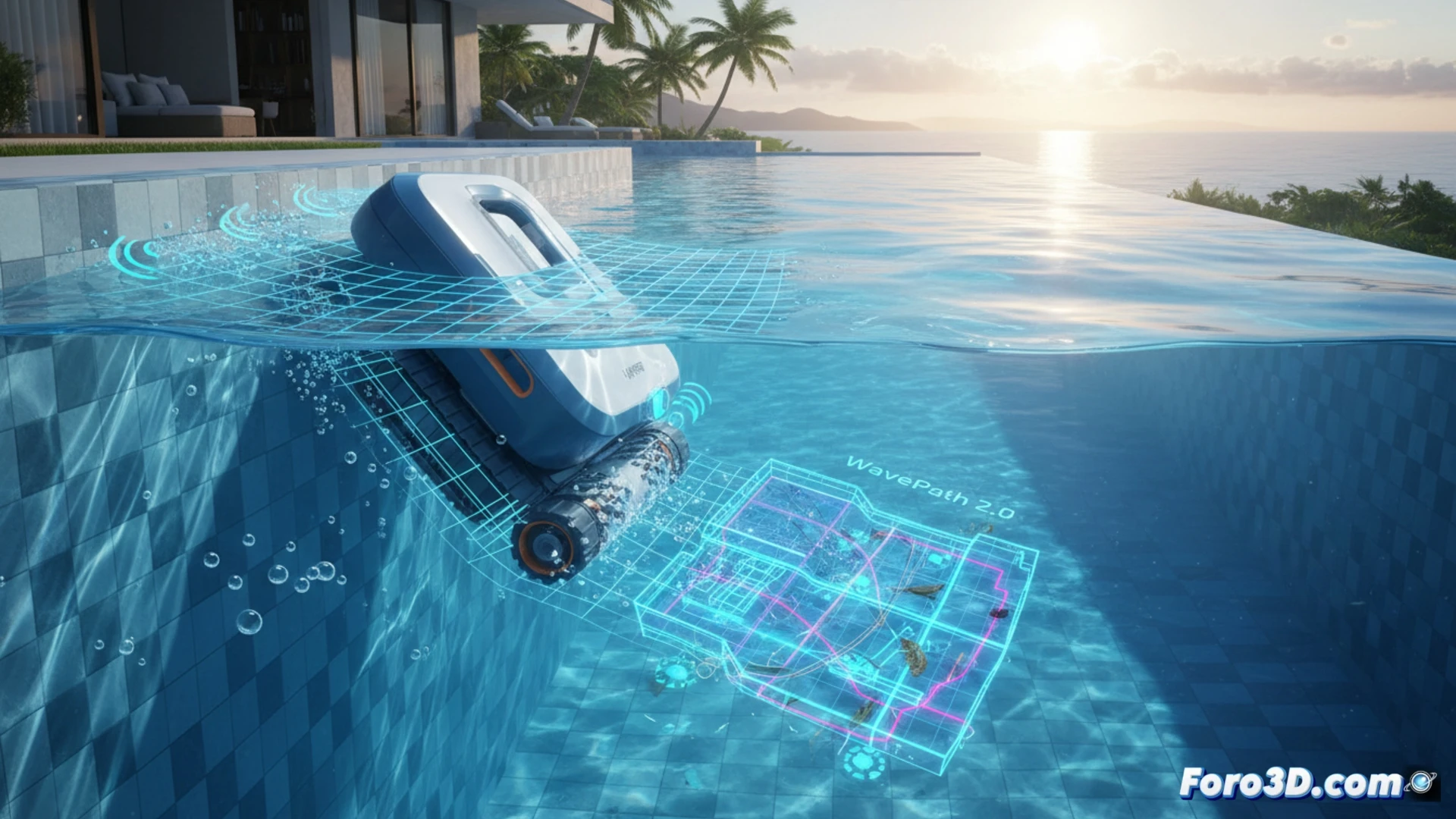
Scuba S1 Proの性能の鍵は、その体積マッピングアルゴリズムにあります。接触センサーや単純なジャイロスコープに依存するロボットとは異なり、WavePath 2.0システムは、3軸加速度計と差圧センサーの組み合わせを使用して、環境の3次元マップを構築します。ロボットはランダムに跳ね返るだけではありません。らせん状と平行な軌道を計算して、プールの底面、壁面、そして水面線をカバーします。傾斜センサーで角度の変化を検出すると、トラクションモーターを作動させて垂直な壁を登り、二重インペラーポンプが発生させる吸引力を利用して表面に吸着します。水面線に到達すると速度を落とし、サイドブラシを伸ばして蓄積されたゴミをかき集め、不要な重複なく周囲の100%が確実にカバーされるようにします。
3D自動化 vs. 従来システム 🏊
有線式やランダムモデルのプールロボットと比較して、S1 Proは優れたエネルギー効率と時間効率を示します。従来のシステムは、既に掃除済みのエリアを掃除するのに時間を浪費したり、階段などの障害物に引っかかったりすることがよくあります。Scuba S1 Proの3D自動化は、水の全体積をマッピングすることで、充電ステーションへの帰還経路を最適化し、汚れが最も蓄積しているエリアを優先します。これにより、推定30%の清掃サイクル時間短縮が実現されるだけでなく、絶え間ない衝突を回避することで機械的な摩耗も最小限に抑えられます。このロボットは、家庭用ロボティクスにおける真の革新は吸引力の強さだけではなく、プールのような複雑な3次元環境を効率的に移動するための知能にあることを示しています。
Aiper Scuba S1 Proのようなプールロボットへの自律ナビゲーションアルゴリズムの実装は、非構造化された水中環境におけるエネルギー効率と完全なカバレッジという主要な課題をどのように解決するのでしょうか?
(追記: ロボットのシミュレーションは楽しいですが、命令に従わないと決めた時は別です。)