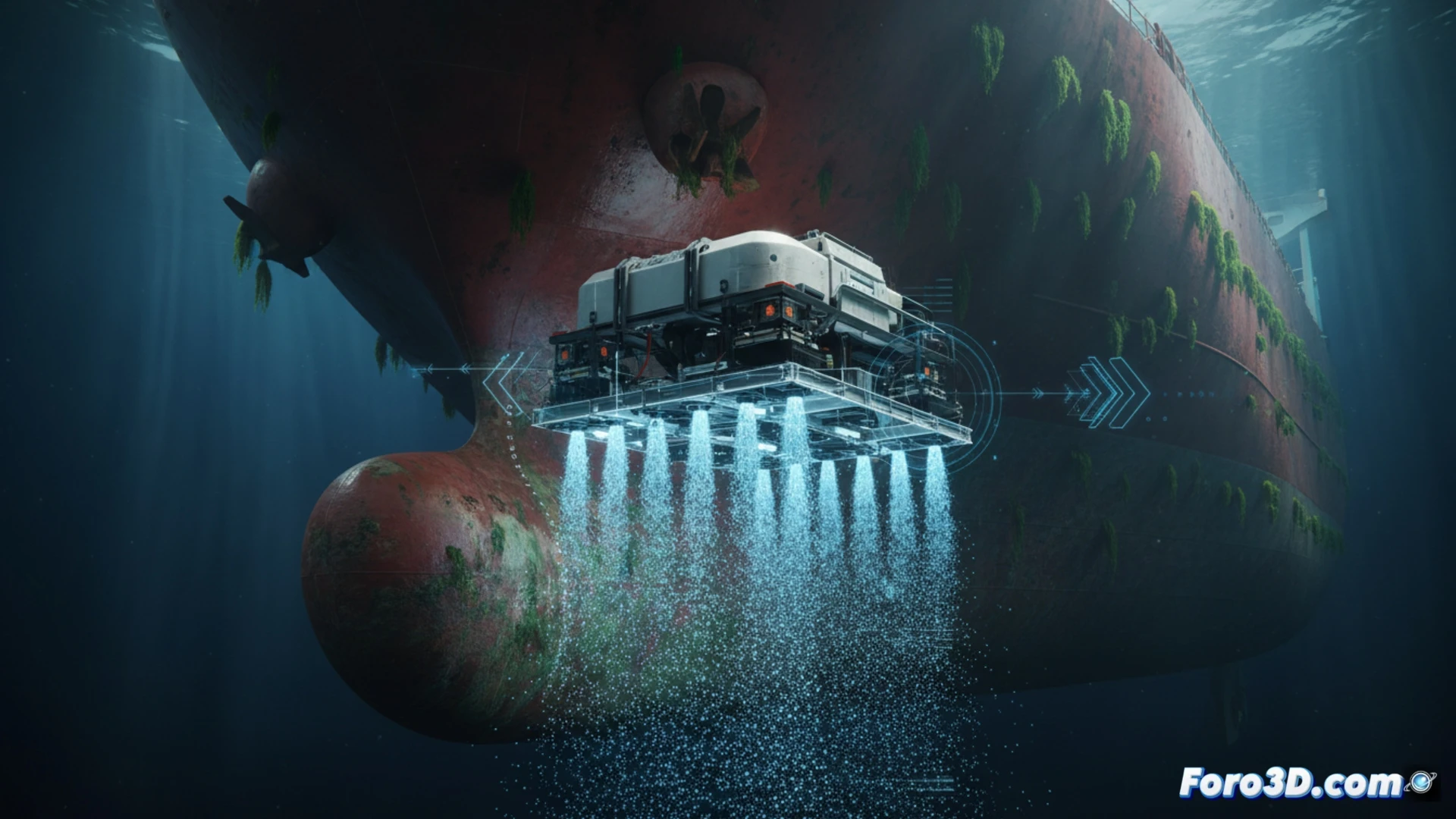
HullWiperは、防錆塗料を傷つけることなく、高圧水ジェットで船体を洗浄するように設計された遠隔操作水中ロボット(ROV)です。その3Dモデリングには、船体の形状、ノズルジェット、流体力学の把握が必要です。この記事では、仮想環境での動作をシミュレーションし、燃料効率と船舶用塗料の寿命を最適化するための技術的なワークフローを詳しく説明します。
技術的ワークフロー:スキャン、メッシュ生成、軌道シミュレーション 🤖
プロセスは、船体のレーザースキャンによる点群データの生成から始まります。これは、CADソフトウェア(BlenderやRhinoなど)で高解像度のポリゴンメッシュに変換されます。次に、サーボモーターと可動式ノズルを備えたROV HullWiperのモデルが統合されます。水ジェットをシミュレートするために、動的パーティクルまたはSPH(Smoothed Particle Hydrodynamics)法に基づく流体が使用されます。次のステップは、塗料を侵食する可能性のある角度を避けながら、スイープアルゴリズムを使用して洗浄軌道を定義することです。最終的なシミュレーションでは、圧力と暴露時間を検証し、塗膜の付着限界を超えないようにパラメータを調整します。
仮想最適化:効率性と塗装損傷の防止 🚢
3Dシミュレーションにより、実際のリスクなしに何百もの設定をテストできます。船体上の圧力分布を可視化することで、ジェットが塗料を剥がす可能性のある重要な領域を特定できます。モデル内でノズルの距離と角度を調整することで、均一な洗浄を実現し、稼働時間を20%削減します。このアプローチにより、船舶の燃料消費を最大10%削減し、塗膜の寿命を延ばすことができ、水中ロボット工学と3Dモデリングが現代の船舶自動化において不可欠な味方であることが実証されています。
ROV HullWiperの水ジェットの3Dモデリングにおいて、洗浄効率を最適化し船体を損傷しないために考慮すべきCFDシミュレーションパラメータは何ですか?
(追記:ロボットのシミュレーションは楽しいですが、命令に従わなくなるまではね。)