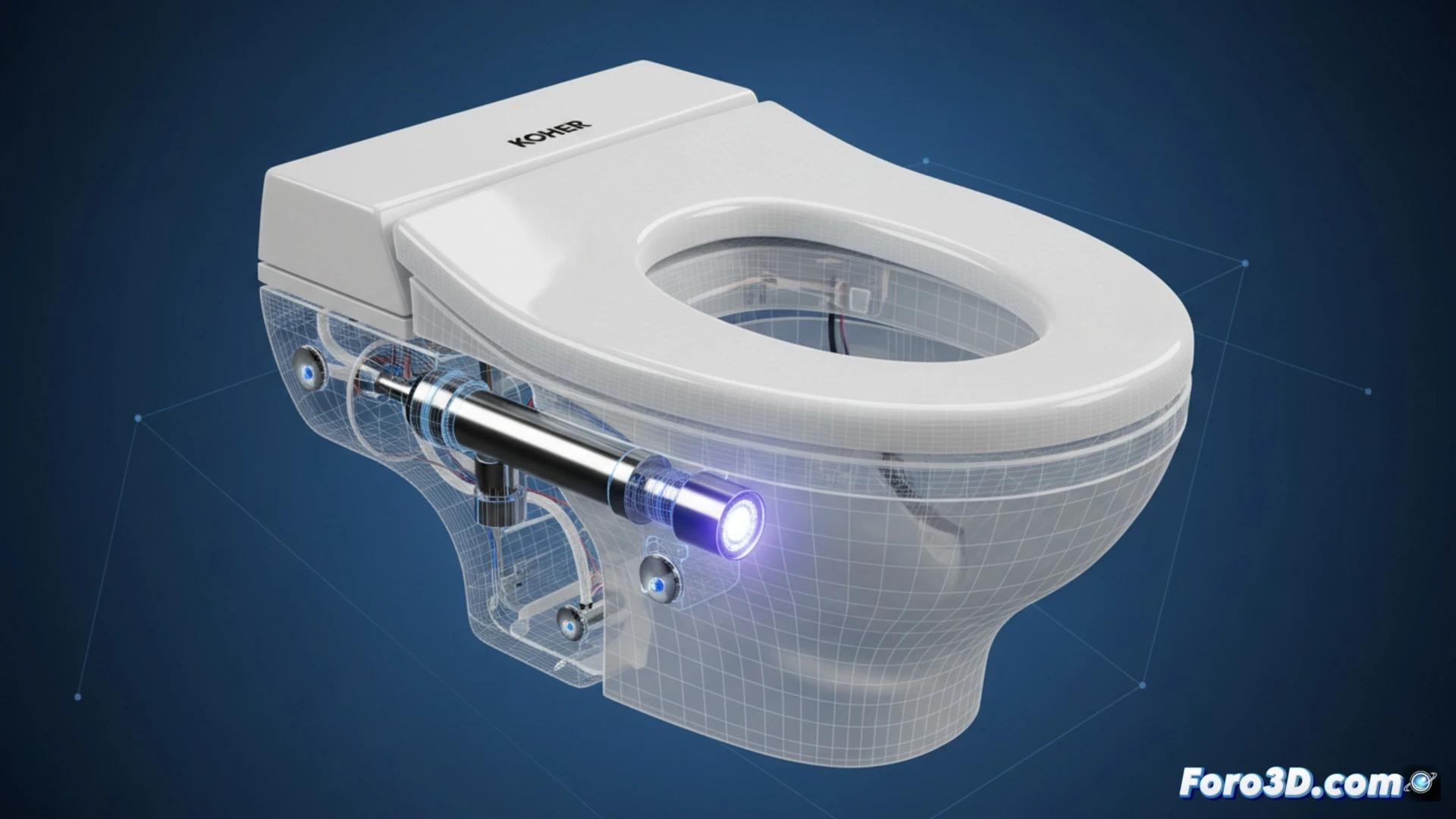
Kohler PureWash E930は、3Dプロダクトデザイナーにとって技術的な挑戦です。その構造は、ガラス化セラミック製の人間工学に基づいた便座と、近接センサー、格納式ノズル、UV-Cランプによる自動洗浄機能を統合した密閉型電子モジュールを組み合わせています。ポリゴンモデリング、不透明素材と半透明素材の間の遷移、そしてIPX4防湿シールを保証する内部コンポーネントの正確な配置を分析します。
インダストリアルデザインとマテリアルシミュレーションの技術的詳細 🛠️
PureWash E930のモデリングには、3つの主要な領域での精度が求められます。第一に、便座の表面は、解剖学的な曲線を再現するために滑らかなサブディビジョントポロジーを必要とし、滑り止めの微細テクスチャをシミュレートするディスプレイスメントマップが必要です。第二に、UV自動洗浄モジュールは、放物面反射鏡と石英ランプを表現するために高密度ジオメトリでモデリングし、レンダリングではボリューメトリックエミッションを持つマテリアルを適用する必要があります。第三に、サイドコントロールパネルとモバイルアプリのインターフェースは、高光沢ABSプラスチック表面上に押し出された3Dワイヤーフレームでシミュレートされ、スペキュラー反射と制御されたラフネスを組み合わせたレイヤーシェーダーを使用して、安っぽいプラスチック効果を回避します。
最終レンダリングにおける視覚化と人間工学の課題 🎯
最大の視覚的課題は、トイレの釉薬セラミックとスマート便座のテクニカルプラスチックの間の遷移です。これを実現するには、セラミックで0.1、プラスチックで0.4と変化するラフネスマップを使用した物理ベースレンダラー(PBR)を使用することをお勧めします。UV洗浄中の流水のシミュレーションには、表面下散乱を伴う流体パーティクルが必要です。さらに、便座の人間工学は、メッシュをエクスポートする前にCADソフトウェアで変形解析によって検証し、着座センサーが最終的な3Dモデルに不快な圧力点を生じさせないようにする必要があります。
機能的な精度やインダストリアルデザインの美観を損なうことなく、Kohler PureWash E930の人間工学に基づいた便座にセンサー統合とUVシステムを3Dモデリングする方法。
(追記: 3Dで製品をデザインすることは、建築家になるようなものですが、レンガのことを心配する必要はありません。)