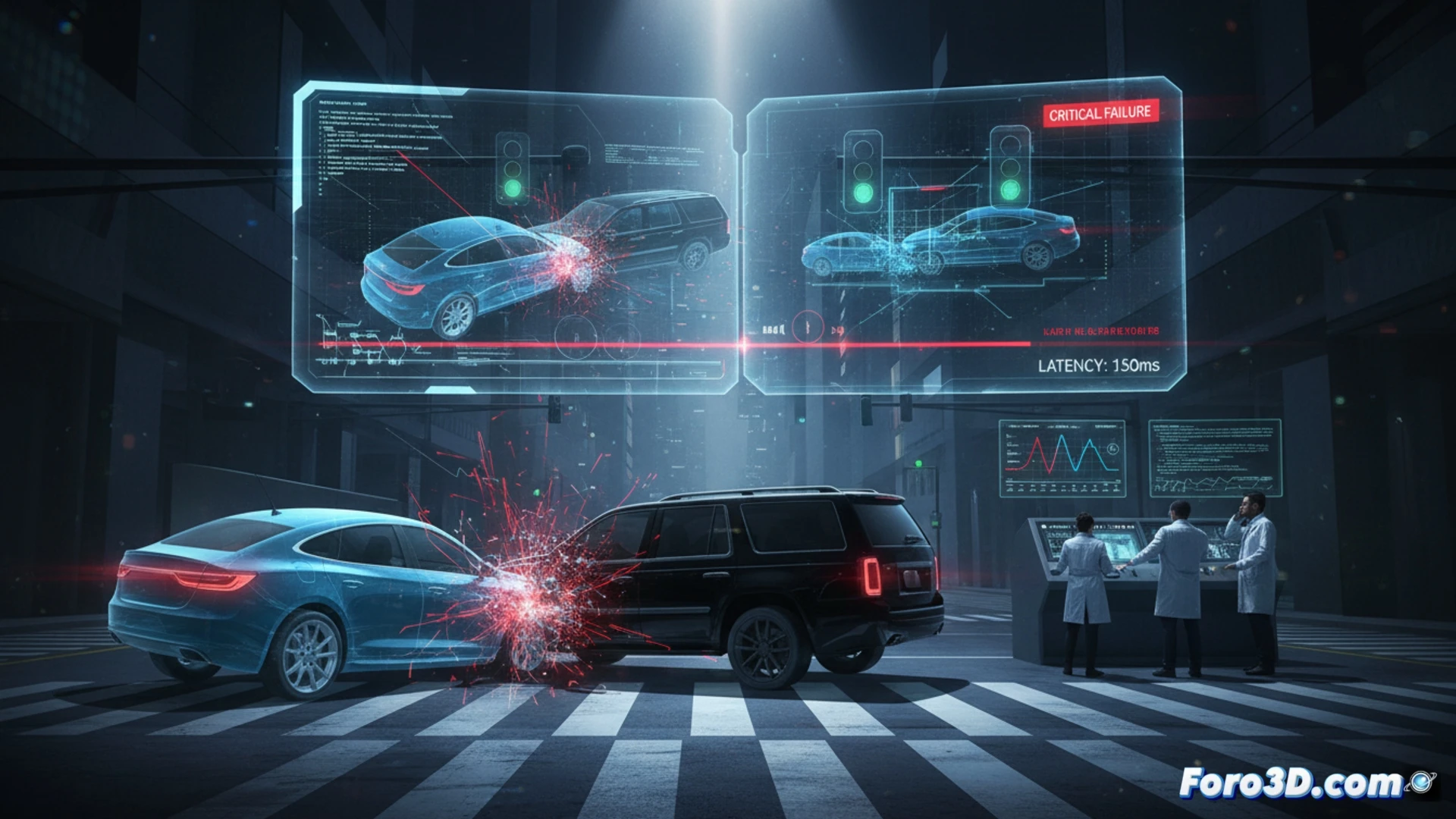
スマート交差点で事故が発生しました。V2X信号機が青信号を示していたにもかかわらず、自動運転車両が適切に反応しませんでした。この故障を解明するため、交差点の正確なデジタルツインが構築されました。このモデルは、路上のLIDARデータを使用して実際の環境を再現し、エンジニアが重要な変数であるセンサー検知から車両応答までのレイテンシを特定できるようにしました。目的は、青信号を死の罠に変えた時間差を見つけることでした。
LIDAR点群のインポートとUnityでのレイテンシシミュレーション 🚦
プロセスは、路上に固定されたLIDARセンサーによる道路形状の取得から始まりました。生データはCloudCompareで処理され、ノイズが除去され、点群が交差点のCADモデルと位置合わせされました。この最適化されたメッシュはUnityにインポートされ、デジタルツインが作成されました。事故を再現するために、V2Xネットワークのレイテンシをシミュレートするスクリプトがプログラムされました。Unreal Engine 5では、正確なシーケンスが可視化されました。LIDARセンサーが歩行者を検出して信号を送信するものの、自動運転車両がブレーキ命令を受信するまでに120ミリ秒の遅延が生じ、衝突を引き起こすのに十分でした。MATLABはデジタルツインのタイムスタンプ信号を分析し、LIDARのタイムスタンプと車両のECUのタイムスタンプを比較することで、重大な時間差を確認しました。
より安全なスマートインフラのための教訓 🛠️
デジタルツインは、故障の原因がセンサーや車両ではなく、V2X同期プロトコルにあることを明らかにしました。120ミリ秒という小さなレイテンシが、高速環境では致命的であることが判明しました。解決策は、より高速なハードウェアだけではなく、デジタルツインでのシミュレーションによって検証された、信号機ソフトウェアに一時的な安全バッファを実装することです。この事例は、スマートシティの信頼性が、仮想ツインと物理システム間の完全な同期に依存していることを強調しています。
エンジニアとして、V2X信号機とデジタルツインクラウド間のどの特定のレイテンシ(ミリ秒単位)が、自動運転車両の反応における致命的な時間差を引き起こしたのか
(追伸: 私のデジタルツインは現在会議中で、私はここでモデリングをしています。つまり、技術的には私は二つの場所に同時にいることになります。)