ロボット手術中の微細手術針の破折は、重大な技術的ジレンマを提起します。材料の疲労による破損なのか、それともロボットの過剰な圧力によるものなのか? 回収された破片は、3D電子顕微鏡(ZEISS ZEN)とマイクロ有限要素シミュレーション(Abaqus)を用いたフォレンジック分析にかけられます。本稿では、構造崩壊の根本原因を特定するためのワークフローを詳述します。
フォレンジックワークフロー:3D顕微鏡写真から疲労シミュレーションへ 🔬
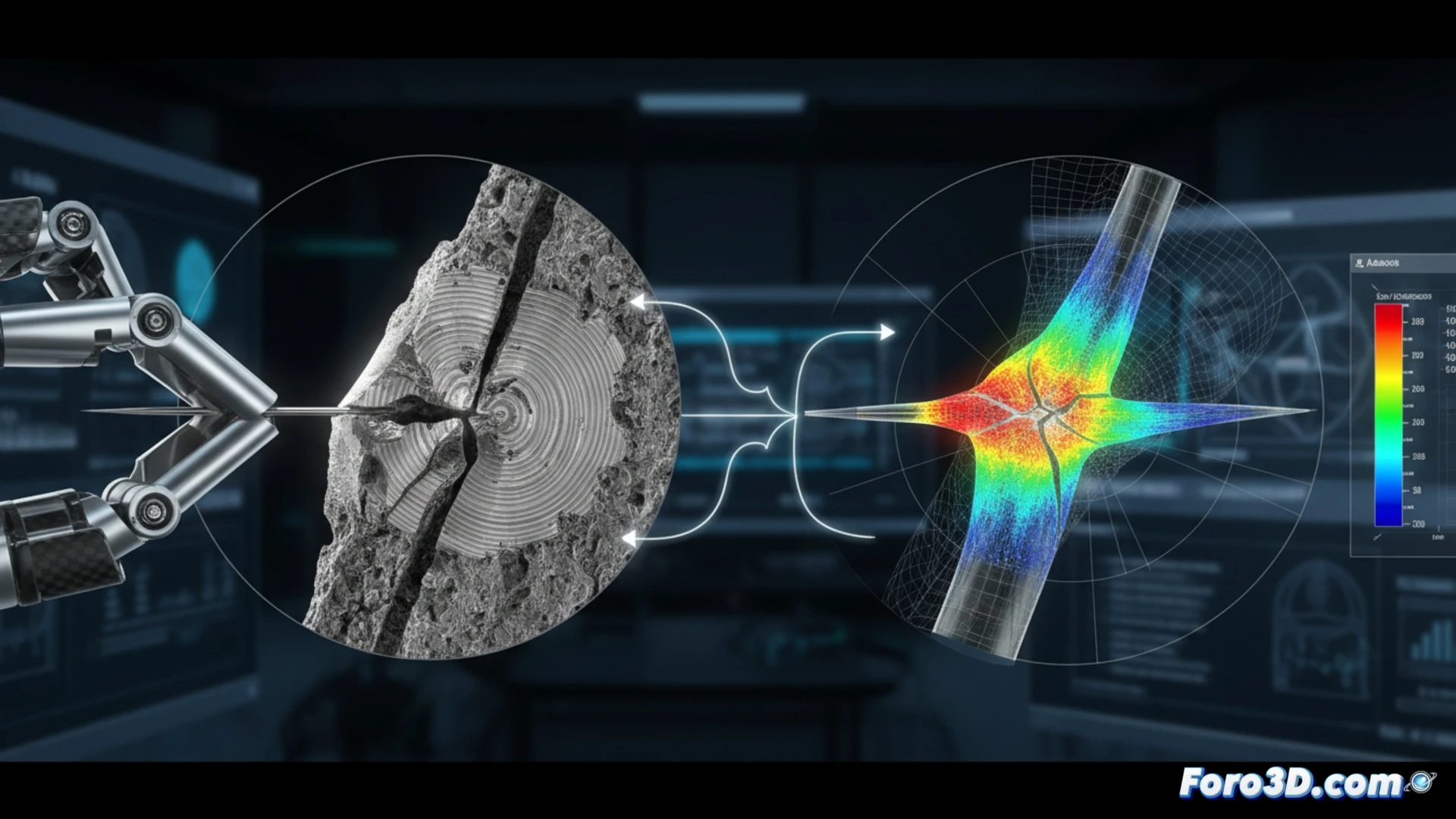
プロセスは、ZEISS ZENで破片の表面トポグラフィを取得することから始まり、き裂進展痕や疲労縞模様を明らかにする高解像度3Dモデルを生成します。このモデルはMaterialise Mimicsにエクスポートされ、実際の形状をセグメント化しアーティファクトを補正します。その後、Abaqusにインポートされ、ロボット縫合に典型的な繰り返し荷重をシミュレートするマイクロFEAが実行されます。この分析では、繰り返しサイクルによる累積疲労と、316Lステンレス鋼の弾性限界を超える一時的な過負荷という2つのシナリオを比較します。針先端におけるフォンミーゼス応力分布により、破損が骨組織との接触領域と一致するかどうかが判断されます。
力覚フィードバックのジレンマ:制御された圧力か、ソフトウェアエラーか? 🤖
シミュレーションにより、一時的な過負荷はエッジが明確な脆性破壊パターンを生成するのに対し、疲労は進行性の縞模様と局所的な塑性変形を生じることが明らかになります。Abaqusモデルが、持続的な圧力条件下でのみ最大応力が材料の閾値を超えたことを確認した場合、原因は力覚フィードバックソフトウェアの故障を示唆します。この分析は材料を exonerate するだけでなく、将来のインシデントを防ぐためにロボットの抵抗アルゴリズムを再調整することを余儀なくさせます。
ロボット手術中に破折した手術針のフォレンジックFEAシミュレーションにおいて、検出されなかった微振動による繰り返し疲労破壊と、ロボットアクチュエータの剛性によって生じた一時的な過負荷破壊をどのように区別できますか?
(追伸:材料の疲労は、10時間シミュレーションをした後のあなたの疲労と同じです。)