最近の手術用ロボットアームの摩耗事故は、高精度環境における材料疲労に関する議論を再燃させています。産業用ロボットでは故障により生産ラインが停止する可能性がありますが、手術支援では摩耗が患者の安全に直接影響を及ぼします。本技術記事では、機械的劣化の原因、デジタルツインを用いた繰り返し応力のシミュレーション、そして3Dモデルに基づく予知保全戦略について分析します。
デジタルツインによる疲労危険箇所のシミュレーション 🔧
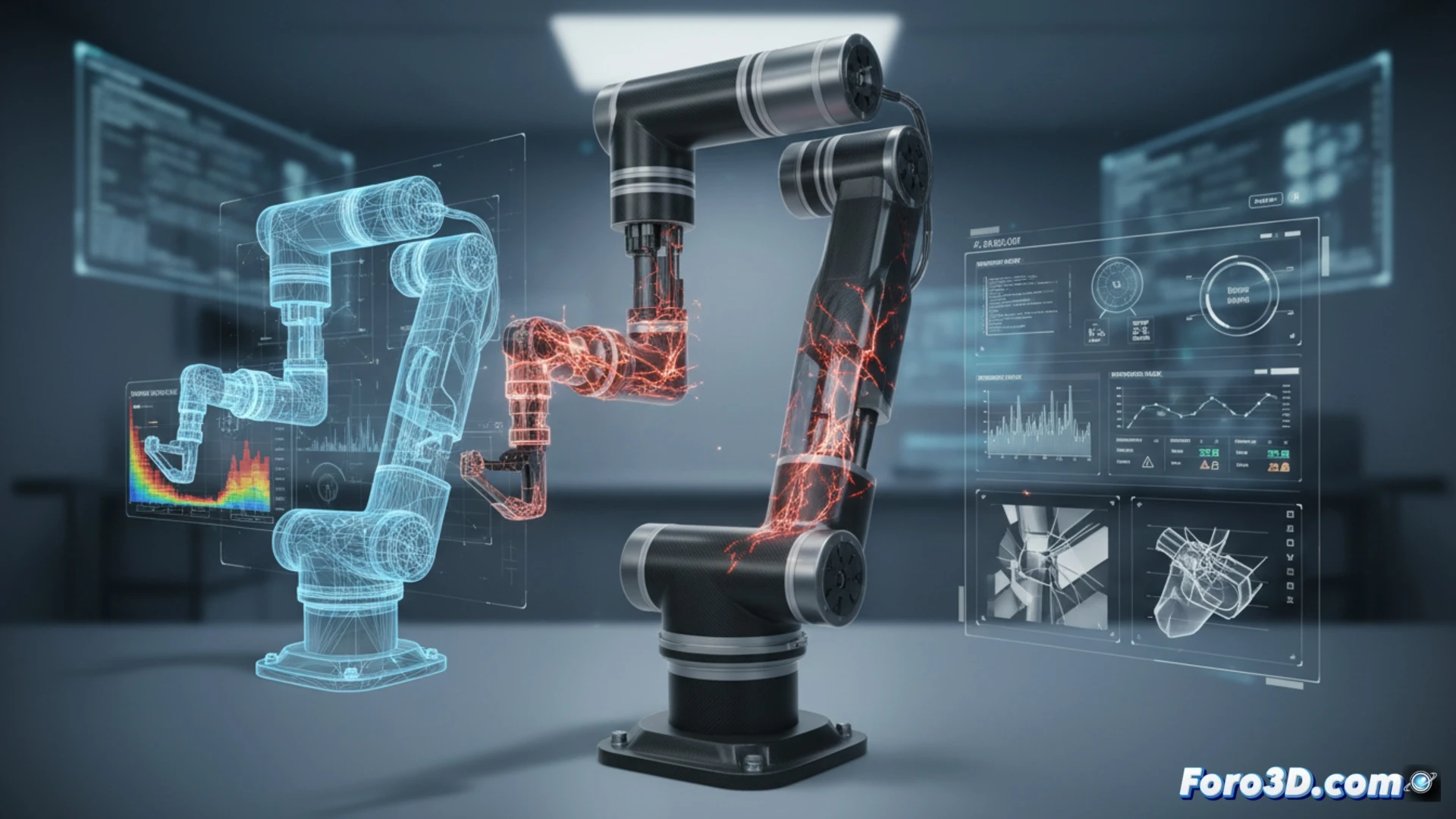
手術用ロボットアームの摩耗は、繰り返しトルクによって微細な亀裂が生じる球面関節やハーモニックドライブに集中する傾向があります。デジタルツインに統合された有限要素シミュレーションにより、エンジニアは応力分布をリアルタイムで可視化できます。例えば、ダヴィンチアームの3Dモデルを用いることで、肘部分が初期設計で推定されたよりも40%多い荷重に耐えていることを特定できます。この技術は振動センサーと組み合わせることで、数週間前に故障を予測し、実際の手術前に潤滑サイクルの調整や重要部品の交換を可能にします。
安全性への影響と事後保全のジレンマ ⚠️
この事故から得られる主な教訓は、医療ロボットは事後的なアプローチを許容できないということです。検出されない微細な摩耗は、縫合中のミリ単位のずれにつながる可能性があります。3Dシミュレーションの活用は保守コストを最適化するだけでなく、認証プロトコルを再定義します。各手術アームに疲労データで更新されたデジタルツインを備えることを義務付けるべきであり、それは選択肢ではなく標準であるべきです。故障を予測する技術は存在します。課題は、摩耗が回避可能なリスクとなる前にそれを実装することです。
最近の手術用ロボットアームの摩耗事故を考慮すると、患者の安全を損なう前に関節の機械的疲労を予測するために、どのような予測シミュレーション手法やリアルタイム監視センサーを実装できるでしょうか?
(追記: ロボットのシミュレーションは楽しいですが、命令に従わなくなるまではね。)